Aligning object templates to a point cloud
This tutorial gives an example of how some of the tools covered in the other tutorials can be combined to solve a higher level problem — aligning a previously captured model of an object to some newly captured data. In this specific example, we’ll take a depth image that contains a person and try to fit some previously captured templates of their face; this will allow us to determine the position and orientation of the face in the scene.
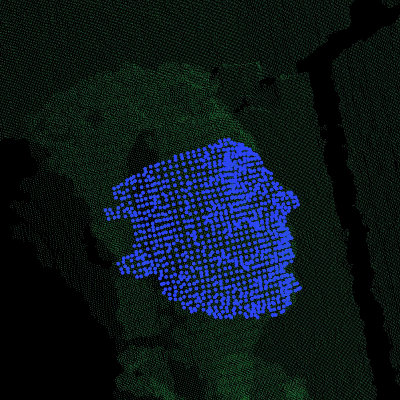
We can use the code below to fit a template of a person’s face (the blue points) to a new point cloud (the green points).
The code
First, download the datasets from github.com/PointCloudLibrary/data/tree/master/tutorials/template_alignment/ and extract the files.
Next, copy and paste the following code into your editor and save it as template_alignment.cpp (or download the source file here).
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 | #include <limits>
#include <fstream>
#include <vector>
#include <Eigen/Core>
#include <pcl/memory.h>
#include <pcl/pcl_macros.h>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/io/pcd_io.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/filters/passthrough.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/features/normal_3d.h>
#include <pcl/features/fpfh.h>
#include <pcl/registration/ia_ransac.h>
class FeatureCloud
{
public:
// A bit of shorthand
typedef pcl::PointCloud<pcl::PointXYZ> PointCloud;
typedef pcl::PointCloud<pcl::Normal> SurfaceNormals;
typedef pcl::PointCloud<pcl::FPFHSignature33> LocalFeatures;
typedef pcl::search::KdTree<pcl::PointXYZ> SearchMethod;
FeatureCloud () :
search_method_xyz_ (new SearchMethod),
normal_radius_ (0.02f),
feature_radius_ (0.02f)
{}
~FeatureCloud () {}
// Process the given cloud
void
setInputCloud (PointCloud::Ptr xyz)
{
xyz_ = xyz;
processInput ();
}
// Load and process the cloud in the given PCD file
void
loadInputCloud (const std::string &pcd_file)
{
xyz_ = PointCloud::Ptr (new PointCloud);
pcl::io::loadPCDFile (pcd_file, *xyz_);
processInput ();
}
// Get a pointer to the cloud 3D points
PointCloud::Ptr
getPointCloud () const
{
return (xyz_);
}
// Get a pointer to the cloud of 3D surface normals
SurfaceNormals::Ptr
getSurfaceNormals () const
{
return (normals_);
}
// Get a pointer to the cloud of feature descriptors
LocalFeatures::Ptr
getLocalFeatures () const
{
return (features_);
}
protected:
// Compute the surface normals and local features
void
processInput ()
{
computeSurfaceNormals ();
computeLocalFeatures ();
}
// Compute the surface normals
void
computeSurfaceNormals ()
{
normals_ = SurfaceNormals::Ptr (new SurfaceNormals);
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> norm_est;
norm_est.setInputCloud (xyz_);
norm_est.setSearchMethod (search_method_xyz_);
norm_est.setRadiusSearch (normal_radius_);
norm_est.compute (*normals_);
}
// Compute the local feature descriptors
void
computeLocalFeatures ()
{
features_ = LocalFeatures::Ptr (new LocalFeatures);
pcl::FPFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fpfh_est;
fpfh_est.setInputCloud (xyz_);
fpfh_est.setInputNormals (normals_);
fpfh_est.setSearchMethod (search_method_xyz_);
fpfh_est.setRadiusSearch (feature_radius_);
fpfh_est.compute (*features_);
}
private:
// Point cloud data
PointCloud::Ptr xyz_;
SurfaceNormals::Ptr normals_;
LocalFeatures::Ptr features_;
SearchMethod::Ptr search_method_xyz_;
// Parameters
float normal_radius_;
float feature_radius_;
};
class TemplateAlignment
{
public:
// A struct for storing alignment results
struct Result
{
float fitness_score;
Eigen::Matrix4f final_transformation;
PCL_MAKE_ALIGNED_OPERATOR_NEW
};
TemplateAlignment () :
min_sample_distance_ (0.05f),
max_correspondence_distance_ (0.01f*0.01f),
nr_iterations_ (500)
{
// Initialize the parameters in the Sample Consensus Initial Alignment (SAC-IA) algorithm
sac_ia_.setMinSampleDistance (min_sample_distance_);
sac_ia_.setMaxCorrespondenceDistance (max_correspondence_distance_);
sac_ia_.setMaximumIterations (nr_iterations_);
}
~TemplateAlignment () {}
// Set the given cloud as the target to which the templates will be aligned
void
setTargetCloud (FeatureCloud &target_cloud)
{
target_ = target_cloud;
sac_ia_.setInputTarget (target_cloud.getPointCloud ());
sac_ia_.setTargetFeatures (target_cloud.getLocalFeatures ());
}
// Add the given cloud to the list of template clouds
void
addTemplateCloud (FeatureCloud &template_cloud)
{
templates_.push_back (template_cloud);
}
// Align the given template cloud to the target specified by setTargetCloud ()
void
align (FeatureCloud &template_cloud, TemplateAlignment::Result &result)
{
sac_ia_.setInputSource (template_cloud.getPointCloud ());
sac_ia_.setSourceFeatures (template_cloud.getLocalFeatures ());
pcl::PointCloud<pcl::PointXYZ> registration_output;
sac_ia_.align (registration_output);
result.fitness_score = (float) sac_ia_.getFitnessScore (max_correspondence_distance_);
result.final_transformation = sac_ia_.getFinalTransformation ();
}
// Align all of template clouds set by addTemplateCloud to the target specified by setTargetCloud ()
void
alignAll (std::vector<TemplateAlignment::Result, Eigen::aligned_allocator<Result> > &results)
{
results.resize (templates_.size ());
for (std::size_t i = 0; i < templates_.size (); ++i)
{
align (templates_[i], results[i]);
}
}
// Align all of template clouds to the target cloud to find the one with best alignment score
int
findBestAlignment (TemplateAlignment::Result &result)
{
// Align all of the templates to the target cloud
std::vector<Result, Eigen::aligned_allocator<Result> > results;
alignAll (results);
// Find the template with the best (lowest) fitness score
float lowest_score = std::numeric_limits<float>::infinity ();
int best_template = 0;
for (std::size_t i = 0; i < results.size (); ++i)
{
const Result &r = results[i];
if (r.fitness_score < lowest_score)
{
lowest_score = r.fitness_score;
best_template = (int) i;
}
}
// Output the best alignment
result = results[best_template];
return (best_template);
}
private:
// A list of template clouds and the target to which they will be aligned
std::vector<FeatureCloud> templates_;
FeatureCloud target_;
// The Sample Consensus Initial Alignment (SAC-IA) registration routine and its parameters
pcl::SampleConsensusInitialAlignment<pcl::PointXYZ, pcl::PointXYZ, pcl::FPFHSignature33> sac_ia_;
float min_sample_distance_;
float max_correspondence_distance_;
int nr_iterations_;
};
// Align a collection of object templates to a sample point cloud
int
main (int argc, char **argv)
{
if (argc < 3)
{
printf ("No target PCD file given!\n");
return (-1);
}
// Load the object templates specified in the object_templates.txt file
std::vector<FeatureCloud> object_templates;
std::ifstream input_stream (argv[1]);
object_templates.resize (0);
std::string pcd_filename;
while (input_stream.good ())
{
std::getline (input_stream, pcd_filename);
if (pcd_filename.empty () || pcd_filename.at (0) == '#') // Skip blank lines or comments
continue;
FeatureCloud template_cloud;
template_cloud.loadInputCloud (pcd_filename);
object_templates.push_back (template_cloud);
}
input_stream.close ();
// Load the target cloud PCD file
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile (argv[2], *cloud);
// Preprocess the cloud by...
// ...removing distant points
const float depth_limit = 1.0;
pcl::PassThrough<pcl::PointXYZ> pass;
pass.setInputCloud (cloud);
pass.setFilterFieldName ("z");
pass.setFilterLimits (0, depth_limit);
pass.filter (*cloud);
// ... and downsampling the point cloud
const float voxel_grid_size = 0.005f;
pcl::VoxelGrid<pcl::PointXYZ> vox_grid;
vox_grid.setInputCloud (cloud);
vox_grid.setLeafSize (voxel_grid_size, voxel_grid_size, voxel_grid_size);
//vox_grid.filter (*cloud); // Please see this http://www.pcl-developers.org/Possible-problem-in-new-VoxelGrid-implementation-from-PCL-1-5-0-td5490361.html
pcl::PointCloud<pcl::PointXYZ>::Ptr tempCloud (new pcl::PointCloud<pcl::PointXYZ>);
vox_grid.filter (*tempCloud);
cloud = tempCloud;
// Assign to the target FeatureCloud
FeatureCloud target_cloud;
target_cloud.setInputCloud (cloud);
// Set the TemplateAlignment inputs
TemplateAlignment template_align;
for (std::size_t i = 0; i < object_templates.size (); ++i)
{
template_align.addTemplateCloud (object_templates[i]);
}
template_align.setTargetCloud (target_cloud);
// Find the best template alignment
TemplateAlignment::Result best_alignment;
int best_index = template_align.findBestAlignment (best_alignment);
const FeatureCloud &best_template = object_templates[best_index];
// Print the alignment fitness score (values less than 0.00002 are good)
printf ("Best fitness score: %f\n", best_alignment.fitness_score);
// Print the rotation matrix and translation vector
Eigen::Matrix3f rotation = best_alignment.final_transformation.block<3,3>(0, 0);
Eigen::Vector3f translation = best_alignment.final_transformation.block<3,1>(0, 3);
printf ("\n");
printf (" | %6.3f %6.3f %6.3f | \n", rotation (0,0), rotation (0,1), rotation (0,2));
printf ("R = | %6.3f %6.3f %6.3f | \n", rotation (1,0), rotation (1,1), rotation (1,2));
printf (" | %6.3f %6.3f %6.3f | \n", rotation (2,0), rotation (2,1), rotation (2,2));
printf ("\n");
printf ("t = < %0.3f, %0.3f, %0.3f >\n", translation (0), translation (1), translation (2));
// Save the aligned template for visualization
pcl::PointCloud<pcl::PointXYZ> transformed_cloud;
pcl::transformPointCloud (*best_template.getPointCloud (), transformed_cloud, best_alignment.final_transformation);
pcl::io::savePCDFileBinary ("output.pcd", transformed_cloud);
return (0);
}
|
The explanation
Now, let’s break down the code piece by piece.
We’ll start by examining the FeatureCloud class. This class is defined in order to provide a convenient method for computing and storing point clouds with local feature descriptors for each point.
The constructor creates a new :pcl:`KdTreeFLANN <pcl::KdTreeFLANN>` object and initializes the radius parameters that will be used when computing surface normals and local features.
typedef pcl::search::KdTree<pcl::PointXYZ> SearchMethod;
FeatureCloud () :
search_method_xyz_ (new SearchMethod),
normal_radius_ (0.02f),
Then we define methods for setting the input cloud, either by passing a shared pointer to a PointCloud or by providing the name of a PCD file to load. In either case, after setting the input, processInput is called, which will compute the local feature descriptors as described later.
~FeatureCloud () {}
// Process the given cloud
void
setInputCloud (PointCloud::Ptr xyz)
{
xyz_ = xyz;
processInput ();
}
// Load and process the cloud in the given PCD file
void
loadInputCloud (const std::string &pcd_file)
{
xyz_ = PointCloud::Ptr (new PointCloud);
pcl::io::loadPCDFile (pcd_file, *xyz_);
We also define some public accessor methods that can be used to get shared pointers to the points, surface normals, and local feature descriptors.
}
// Get a pointer to the cloud 3D points
PointCloud::Ptr
getPointCloud () const
{
return (xyz_);
}
// Get a pointer to the cloud of 3D surface normals
SurfaceNormals::Ptr
getSurfaceNormals () const
{
return (normals_);
}
// Get a pointer to the cloud of feature descriptors
LocalFeatures::Ptr
getLocalFeatures () const
{
Next we define the method for processing the input point cloud, which first computes the cloud’s surface normals and then computes its local features.
protected:
// Compute the surface normals and local features
void
processInput ()
{
computeSurfaceNormals ();
We use PCL’s :pcl:`NormalEstimation <pcl::NormalEstimation>` class to compute the surface normals. To do so, we must specify the input point cloud, the KdTree to use when searching for neighboring points, and the radius that defines each point’s neighborhood. We then compute the surface normals and store them in a member variable for later use.
}
// Compute the surface normals
void
computeSurfaceNormals ()
{
normals_ = SurfaceNormals::Ptr (new SurfaceNormals);
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> norm_est;
norm_est.setInputCloud (xyz_);
norm_est.setSearchMethod (search_method_xyz_);
norm_est.setRadiusSearch (normal_radius_);
Similarly, we use PCL’s :pcl:`FPFHEstimation <pcl::FPFHEstimation>` class to compute “Fast Point Feature Histogram” descriptors from the input point cloud and its surface normals.
}
// Compute the local feature descriptors
void
computeLocalFeatures ()
{
features_ = LocalFeatures::Ptr (new LocalFeatures);
pcl::FPFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fpfh_est;
fpfh_est.setInputCloud (xyz_);
fpfh_est.setInputNormals (normals_);
fpfh_est.setSearchMethod (search_method_xyz_);
fpfh_est.setRadiusSearch (feature_radius_);
The methods described above serve to encapsulate the work needed to compute feature descriptors and store them with their corresponding 3D point cloud.
Now we’ll examine the TemplateAlignment class, which as the name suggests, will be used to perform template alignment (also referred to as template fitting/matching/registration). A template is typically a small group of pixels or points that represents a known part of a larger object or scene. By registering a template to a new image or point cloud, you can determine the position and orientation of the object that the template represents.
We start by defining a structure to store the alignment results. It contains a floating point value that represents the “fitness” of the alignment (a lower number means a better alignment) and a transformation matrix that describes how template points should be rotated and translated in order to best align with the points in the target cloud.
Note
Because we are including an Eigen::Matrix4f in this struct, we need to include the EIGEN_MAKE_ALIGNED_OPERATOR_NEW macro, which will overload the struct’s “operator new” so that it will generate 16-bytes-aligned pointers. If you’re curious, you can find more information about this issue here. For convenience, there is a redefinition of the macro in memory.h, aptly named PCL_MAKE_ALIGNED_OPERATOR_NEW which will let us for example call pcl::make_shared to create a shared_ptr of over-aligned classes.
public:
// A struct for storing alignment results
struct Result
{
float fitness_score;
Eigen::Matrix4f final_transformation;
In the constructor, we initialize the :pcl:`SampleConsensusInitialAlignment <pcl::SampleConsensusInitialAlignment>` (SAC-IA) object that we’ll be using to perform the alignment, providing values for each of its parameters. (Note: the maximum correspondence distance is actually specified as squared distance; for this example, we’ve decided to truncate the error with an upper limit of 1 cm, so we pass in 0.01 squared.)
};
TemplateAlignment () :
min_sample_distance_ (0.05f),
max_correspondence_distance_ (0.01f*0.01f),
nr_iterations_ (500)
{
// Initialize the parameters in the Sample Consensus Initial Alignment (SAC-IA) algorithm
sac_ia_.setMinSampleDistance (min_sample_distance_);
sac_ia_.setMaxCorrespondenceDistance (max_correspondence_distance_);
Next we define a method for setting the target cloud (i.e., the cloud to which the templates will be aligned), which sets the inputs of SAC-IA alignment algorithm.
~TemplateAlignment () {}
// Set the given cloud as the target to which the templates will be aligned
void
setTargetCloud (FeatureCloud &target_cloud)
{
target_ = target_cloud;
sac_ia_.setInputTarget (target_cloud.getPointCloud ());
We then define a method for specifying which template or templates to attempt to align. Each call to this method will add the given template cloud to an internal vector of FeatureClouds and store them for future use.
}
// Add the given cloud to the list of template clouds
void
addTemplateCloud (FeatureCloud &template_cloud)
{
Next we define our alignment method. This method takes a template as input and aligns it to the target cloud that was specified by calling :pcl:`setInputTarget <pcl::Registration::setInputTarget>`. It works by setting the given template as the SAC-IA algorithm’s source cloud and then calling its :pcl:`align <pcl::Registration::align>` method to align the source to the target. Note that the :pcl:`align <pcl::Registration::align>` method requires us to pass in a point cloud that will store the newly aligned source cloud, but we can ignore this output for our application. Instead, we call SAC-IA’s accessor methods to get the alignment’s fitness score and final transformation matrix (the rigid transformation from the source cloud to the target), and we output them as a Result struct.
}
// Align the given template cloud to the target specified by setTargetCloud ()
void
align (FeatureCloud &template_cloud, TemplateAlignment::Result &result)
{
sac_ia_.setInputSource (template_cloud.getPointCloud ());
sac_ia_.setSourceFeatures (template_cloud.getLocalFeatures ());
pcl::PointCloud<pcl::PointXYZ> registration_output;
sac_ia_.align (registration_output);
result.fitness_score = (float) sac_ia_.getFitnessScore (max_correspondence_distance_);
Because this class is designed to work with multiple templates, we also define a method for aligning all of the templates to the target cloud and storing the results in a vector of Result structs.
}
// Align all of template clouds set by addTemplateCloud to the target specified by setTargetCloud ()
void
alignAll (std::vector<TemplateAlignment::Result, Eigen::aligned_allocator<Result> > &results)
{
results.resize (templates_.size ());
for (std::size_t i = 0; i < templates_.size (); ++i)
{
align (templates_[i], results[i]);
Finally, we define a method that will align all of the templates to the target cloud and return the index of the best match and its corresponding Result struct.
}
// Align all of template clouds to the target cloud to find the one with best alignment score
int
findBestAlignment (TemplateAlignment::Result &result)
{
// Align all of the templates to the target cloud
std::vector<Result, Eigen::aligned_allocator<Result> > results;
alignAll (results);
// Find the template with the best (lowest) fitness score
float lowest_score = std::numeric_limits<float>::infinity ();
int best_template = 0;
for (std::size_t i = 0; i < results.size (); ++i)
{
const Result &r = results[i];
if (r.fitness_score < lowest_score)
{
lowest_score = r.fitness_score;
best_template = (int) i;
}
}
// Output the best alignment
result = results[best_template];
Now that we have a class that handles aligning object templates, we’ll apply it to the the problem of face alignment. In the supplied data files, we’ve included six template point clouds that we created from different views of a person’s face. Each one was downsampled to a spacing of 5mm and manually cropped to include only points from the face. In the following code, we show how to use our TemplateAlignment class to locate the position and orientation of the person’s face in a new cloud.
First, we load the object template clouds. We’ve stored our templates as .PCD files, and we’ve listed their names in a file called object_templates.txt. Here, we read in each file name, load it into a FeatureCloud, and store the FeatureCloud in a vector for later.
}
// Load the object templates specified in the object_templates.txt file
std::vector<FeatureCloud> object_templates;
std::ifstream input_stream (argv[1]);
object_templates.resize (0);
std::string pcd_filename;
while (input_stream.good ())
{
std::getline (input_stream, pcd_filename);
if (pcd_filename.empty () || pcd_filename.at (0) == '#') // Skip blank lines or comments
continue;
FeatureCloud template_cloud;
template_cloud.loadInputCloud (pcd_filename);
object_templates.push_back (template_cloud);
Next we load the target cloud (from the filename supplied on the command line).
input_stream.close ();
// Load the target cloud PCD file
We then perform a little pre-processing on the data to get it ready for alignment. The first step is to filter out any background points. In this example we assume the person we’re trying to align to will be less than 1 meter away, so we apply a pass-through filter, filtering on the “z” field (i.e., depth) with limits of 0 to 1.
Note
This is application and data dependent. You may need to tune the threshold (or drop this filter entirely) to make it work with your data.
pcl::io::loadPCDFile (argv[2], *cloud);
// Preprocess the cloud by...
// ...removing distant points
const float depth_limit = 1.0;
pcl::PassThrough<pcl::PointXYZ> pass;
pass.setInputCloud (cloud);
pass.setFilterFieldName ("z");
We also downsample the point cloud with a spacing of 5mm, which reduces the amount of computation that’s required.
pass.filter (*cloud);
// ... and downsampling the point cloud
const float voxel_grid_size = 0.005f;
pcl::VoxelGrid<pcl::PointXYZ> vox_grid;
vox_grid.setInputCloud (cloud);
And after the pre-processing is finished, we create our target FeatureCloud.
//vox_grid.filter (*cloud); // Please see this http://www.pcl-developers.org/Possible-problem-in-new-VoxelGrid-implementation-from-PCL-1-5-0-td5490361.html
pcl::PointCloud<pcl::PointXYZ>::Ptr tempCloud (new pcl::PointCloud<pcl::PointXYZ>);
vox_grid.filter (*tempCloud);
Next, we initialize our TemplateAlignment object. For this, we need to add each of our template clouds and set the target cloud.
// Assign to the target FeatureCloud
FeatureCloud target_cloud;
target_cloud.setInputCloud (cloud);
// Set the TemplateAlignment inputs
TemplateAlignment template_align;
Now that our TemplateAlignment object is initialized, we’re ready call the findBestAlignment method to determine which template best fits the given target cloud. We store the alignment results in best_alignment.
{
template_align.addTemplateCloud (object_templates[i]);
}
template_align.setTargetCloud (target_cloud);
Next we output the results. Looking at the fitness score (best_alignment.fitness_score) gives us an idea of how successful the alignment was, and looking at the transformation matrix (best_alignment.final_transformation) tells us the position and orientation of the object we aligned to in the target cloud. Specifically, because it’s a rigid transformation, it can be decomposed into a 3-dimensional translation vector  and a 3 x 3 rotation matrix
and a 3 x 3 rotation matrix  as follows:
as follows:
![T = \left[ \begin{array}{cccc}
& & & t_x \\
& R & & t_y \\
& & & t_z \\
0 & 0 & 0 & 1 \end{array} \right]](_images/math/9e92aa1c8154642e6f54eef0fd59d211d4195eae.png)
// Find the best template alignment
TemplateAlignment::Result best_alignment;
int best_index = template_align.findBestAlignment (best_alignment);
const FeatureCloud &best_template = object_templates[best_index];
// Print the alignment fitness score (values less than 0.00002 are good)
printf ("Best fitness score: %f\n", best_alignment.fitness_score);
// Print the rotation matrix and translation vector
Eigen::Matrix3f rotation = best_alignment.final_transformation.block<3,3>(0, 0);
Eigen::Vector3f translation = best_alignment.final_transformation.block<3,1>(0, 3);
printf ("\n");
Finally, we take the best fitting template, apply the transform that aligns it to the target cloud, and save the aligned template out as a .PCD file so that we can visualize it later to see how well the alignment worked.
printf ("R = | %6.3f %6.3f %6.3f | \n", rotation (1,0), rotation (1,1), rotation (1,2));
printf (" | %6.3f %6.3f %6.3f | \n", rotation (2,0), rotation (2,1), rotation (2,2));
printf ("\n");
printf ("t = < %0.3f, %0.3f, %0.3f >\n", translation (0), translation (1), translation (2));
Compiling and running the program
Add the following lines to your CMakeLists.txt file:
1 2 3 4 5 6 7 8 9 10 11 12 | cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(template_alignment)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (template_alignment template_alignment.cpp)
target_link_libraries (template_alignment ${PCL_LIBRARIES})
|
After you have made the executable, you can run it like so:
$ ./template_alignment data/object_templates.txt data/person.pcd
After a few seconds, you will see output similar to:
Best fitness score: 0.000009
| 0.834 0.295 0.466 |
R = | -0.336 0.942 0.006 |
| -0.437 -0.162 0.885 |
t = < -0.373, -0.097, 0.087 >
You can also use the pcl_viewer utility to visualize the aligned template and overlay it against the target cloud by running the following command:
$ pcl_viewer data/person.pcd output.pcd
The clouds should look something like this: