3D Object Recognition based on Correspondence Grouping
This tutorial aims at explaining how to perform 3D Object Recognition based on the pcl_recognition module. Specifically, it explains how to use Correspondence Grouping algorithms in order to cluster the set of point-to-point correspondences obtained after the 3D descriptor matching stage into model instances that are present in the current scene. For each cluster, representing a possible model instance in the scene, the Correspondence Grouping algorithms also output the transformation matrix identifying the 6DOF pose estimation of that model in the current scene.
The code
Before you begin, you should download the PCD dataset used in this tutorial from GitHub (milk.pcd and milk_cartoon_all_small_clorox.pcd) and put the files in a folder of your convenience.
Also, copy and paste the following code into your editor and save it as correspondence_grouping.cpp (or download the source file here).
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 | #include <pcl/io/pcd_io.h>
#include <pcl/point_cloud.h>
#include <pcl/correspondence.h>
#include <pcl/features/normal_3d_omp.h>
#include <pcl/features/shot_omp.h>
#include <pcl/features/board.h>
#include <pcl/filters/uniform_sampling.h>
#include <pcl/recognition/cg/hough_3d.h>
#include <pcl/recognition/cg/geometric_consistency.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/kdtree/impl/kdtree_flann.hpp>
#include <pcl/common/transforms.h>
#include <pcl/console/parse.h>
typedef pcl::PointXYZRGBA PointType;
typedef pcl::Normal NormalType;
typedef pcl::ReferenceFrame RFType;
typedef pcl::SHOT352 DescriptorType;
std::string model_filename_;
std::string scene_filename_;
//Algorithm params
bool show_keypoints_ (false);
bool show_correspondences_ (false);
bool use_cloud_resolution_ (false);
bool use_hough_ (true);
float model_ss_ (0.01f);
float scene_ss_ (0.03f);
float rf_rad_ (0.015f);
float descr_rad_ (0.02f);
float cg_size_ (0.01f);
float cg_thresh_ (5.0f);
void
showHelp (char *filename)
{
std::cout << std::endl;
std::cout << "***************************************************************************" << std::endl;
std::cout << "* *" << std::endl;
std::cout << "* Correspondence Grouping Tutorial - Usage Guide *" << std::endl;
std::cout << "* *" << std::endl;
std::cout << "***************************************************************************" << std::endl << std::endl;
std::cout << "Usage: " << filename << " model_filename.pcd scene_filename.pcd [Options]" << std::endl << std::endl;
std::cout << "Options:" << std::endl;
std::cout << " -h: Show this help." << std::endl;
std::cout << " -k: Show used keypoints." << std::endl;
std::cout << " -c: Show used correspondences." << std::endl;
std::cout << " -r: Compute the model cloud resolution and multiply" << std::endl;
std::cout << " each radius given by that value." << std::endl;
std::cout << " --algorithm (Hough|GC): Clustering algorithm used (default Hough)." << std::endl;
std::cout << " --model_ss val: Model uniform sampling radius (default 0.01)" << std::endl;
std::cout << " --scene_ss val: Scene uniform sampling radius (default 0.03)" << std::endl;
std::cout << " --rf_rad val: Reference frame radius (default 0.015)" << std::endl;
std::cout << " --descr_rad val: Descriptor radius (default 0.02)" << std::endl;
std::cout << " --cg_size val: Cluster size (default 0.01)" << std::endl;
std::cout << " --cg_thresh val: Clustering threshold (default 5)" << std::endl << std::endl;
}
void
parseCommandLine (int argc, char *argv[])
{
//Show help
if (pcl::console::find_switch (argc, argv, "-h"))
{
showHelp (argv[0]);
exit (0);
}
//Model & scene filenames
std::vector<int> filenames;
filenames = pcl::console::parse_file_extension_argument (argc, argv, ".pcd");
if (filenames.size () != 2)
{
std::cout << "Filenames missing.\n";
showHelp (argv[0]);
exit (-1);
}
model_filename_ = argv[filenames[0]];
scene_filename_ = argv[filenames[1]];
//Program behavior
if (pcl::console::find_switch (argc, argv, "-k"))
{
show_keypoints_ = true;
}
if (pcl::console::find_switch (argc, argv, "-c"))
{
show_correspondences_ = true;
}
if (pcl::console::find_switch (argc, argv, "-r"))
{
use_cloud_resolution_ = true;
}
std::string used_algorithm;
if (pcl::console::parse_argument (argc, argv, "--algorithm", used_algorithm) != -1)
{
if (used_algorithm.compare ("Hough") == 0)
{
use_hough_ = true;
}else if (used_algorithm.compare ("GC") == 0)
{
use_hough_ = false;
}
else
{
std::cout << "Wrong algorithm name.\n";
showHelp (argv[0]);
exit (-1);
}
}
//General parameters
pcl::console::parse_argument (argc, argv, "--model_ss", model_ss_);
pcl::console::parse_argument (argc, argv, "--scene_ss", scene_ss_);
pcl::console::parse_argument (argc, argv, "--rf_rad", rf_rad_);
pcl::console::parse_argument (argc, argv, "--descr_rad", descr_rad_);
pcl::console::parse_argument (argc, argv, "--cg_size", cg_size_);
pcl::console::parse_argument (argc, argv, "--cg_thresh", cg_thresh_);
}
double
computeCloudResolution (const pcl::PointCloud<PointType>::ConstPtr &cloud)
{
double res = 0.0;
int n_points = 0;
int nres;
std::vector<int> indices (2);
std::vector<float> sqr_distances (2);
pcl::search::KdTree<PointType> tree;
tree.setInputCloud (cloud);
for (std::size_t i = 0; i < cloud->size (); ++i)
{
if (! std::isfinite ((*cloud)[i].x))
{
continue;
}
//Considering the second neighbor since the first is the point itself.
nres = tree.nearestKSearch (i, 2, indices, sqr_distances);
if (nres == 2)
{
res += sqrt (sqr_distances[1]);
++n_points;
}
}
if (n_points != 0)
{
res /= n_points;
}
return res;
}
int
main (int argc, char *argv[])
{
parseCommandLine (argc, argv);
pcl::PointCloud<PointType>::Ptr model (new pcl::PointCloud<PointType> ());
pcl::PointCloud<PointType>::Ptr model_keypoints (new pcl::PointCloud<PointType> ());
pcl::PointCloud<PointType>::Ptr scene (new pcl::PointCloud<PointType> ());
pcl::PointCloud<PointType>::Ptr scene_keypoints (new pcl::PointCloud<PointType> ());
pcl::PointCloud<NormalType>::Ptr model_normals (new pcl::PointCloud<NormalType> ());
pcl::PointCloud<NormalType>::Ptr scene_normals (new pcl::PointCloud<NormalType> ());
pcl::PointCloud<DescriptorType>::Ptr model_descriptors (new pcl::PointCloud<DescriptorType> ());
pcl::PointCloud<DescriptorType>::Ptr scene_descriptors (new pcl::PointCloud<DescriptorType> ());
//
// Load clouds
//
if (pcl::io::loadPCDFile (model_filename_, *model) < 0)
{
std::cout << "Error loading model cloud." << std::endl;
showHelp (argv[0]);
return (-1);
}
if (pcl::io::loadPCDFile (scene_filename_, *scene) < 0)
{
std::cout << "Error loading scene cloud." << std::endl;
showHelp (argv[0]);
return (-1);
}
//
// Set up resolution invariance
//
if (use_cloud_resolution_)
{
float resolution = static_cast<float> (computeCloudResolution (model));
if (resolution != 0.0f)
{
model_ss_ *= resolution;
scene_ss_ *= resolution;
rf_rad_ *= resolution;
descr_rad_ *= resolution;
cg_size_ *= resolution;
}
std::cout << "Model resolution: " << resolution << std::endl;
std::cout << "Model sampling size: " << model_ss_ << std::endl;
std::cout << "Scene sampling size: " << scene_ss_ << std::endl;
std::cout << "LRF support radius: " << rf_rad_ << std::endl;
std::cout << "SHOT descriptor radius: " << descr_rad_ << std::endl;
std::cout << "Clustering bin size: " << cg_size_ << std::endl << std::endl;
}
//
// Compute Normals
//
pcl::NormalEstimationOMP<PointType, NormalType> norm_est;
norm_est.setKSearch (10);
norm_est.setInputCloud (model);
norm_est.compute (*model_normals);
norm_est.setInputCloud (scene);
norm_est.compute (*scene_normals);
//
// Downsample Clouds to Extract keypoints
//
pcl::UniformSampling<PointType> uniform_sampling;
uniform_sampling.setInputCloud (model);
uniform_sampling.setRadiusSearch (model_ss_);
uniform_sampling.filter (*model_keypoints);
std::cout << "Model total points: " << model->size () << "; Selected Keypoints: " << model_keypoints->size () << std::endl;
uniform_sampling.setInputCloud (scene);
uniform_sampling.setRadiusSearch (scene_ss_);
uniform_sampling.filter (*scene_keypoints);
std::cout << "Scene total points: " << scene->size () << "; Selected Keypoints: " << scene_keypoints->size () << std::endl;
//
// Compute Descriptor for keypoints
//
pcl::SHOTEstimationOMP<PointType, NormalType, DescriptorType> descr_est;
descr_est.setRadiusSearch (descr_rad_);
descr_est.setInputCloud (model_keypoints);
descr_est.setInputNormals (model_normals);
descr_est.setSearchSurface (model);
descr_est.compute (*model_descriptors);
descr_est.setInputCloud (scene_keypoints);
descr_est.setInputNormals (scene_normals);
descr_est.setSearchSurface (scene);
descr_est.compute (*scene_descriptors);
//
// Find Model-Scene Correspondences with KdTree
//
pcl::CorrespondencesPtr model_scene_corrs (new pcl::Correspondences ());
pcl::KdTreeFLANN<DescriptorType> match_search;
match_search.setInputCloud (model_descriptors);
// For each scene keypoint descriptor, find nearest neighbor into the model keypoints descriptor cloud and add it to the correspondences vector.
for (std::size_t i = 0; i < scene_descriptors->size (); ++i)
{
std::vector<int> neigh_indices (1);
std::vector<float> neigh_sqr_dists (1);
if (!std::isfinite (scene_descriptors->at (i).descriptor[0])) //skipping NaNs
{
continue;
}
int found_neighs = match_search.nearestKSearch (scene_descriptors->at (i), 1, neigh_indices, neigh_sqr_dists);
if(found_neighs == 1 && neigh_sqr_dists[0] < 0.25f) // add match only if the squared descriptor distance is less than 0.25 (SHOT descriptor distances are between 0 and 1 by design)
{
pcl::Correspondence corr (neigh_indices[0], static_cast<int> (i), neigh_sqr_dists[0]);
model_scene_corrs->push_back (corr);
}
}
std::cout << "Correspondences found: " << model_scene_corrs->size () << std::endl;
//
// Actual Clustering
//
std::vector<Eigen::Matrix4f, Eigen::aligned_allocator<Eigen::Matrix4f> > rototranslations;
std::vector<pcl::Correspondences> clustered_corrs;
// Using Hough3D
if (use_hough_)
{
//
// Compute (Keypoints) Reference Frames only for Hough
//
pcl::PointCloud<RFType>::Ptr model_rf (new pcl::PointCloud<RFType> ());
pcl::PointCloud<RFType>::Ptr scene_rf (new pcl::PointCloud<RFType> ());
pcl::BOARDLocalReferenceFrameEstimation<PointType, NormalType, RFType> rf_est;
rf_est.setFindHoles (true);
rf_est.setRadiusSearch (rf_rad_);
rf_est.setInputCloud (model_keypoints);
rf_est.setInputNormals (model_normals);
rf_est.setSearchSurface (model);
rf_est.compute (*model_rf);
rf_est.setInputCloud (scene_keypoints);
rf_est.setInputNormals (scene_normals);
rf_est.setSearchSurface (scene);
rf_est.compute (*scene_rf);
// Clustering
pcl::Hough3DGrouping<PointType, PointType, RFType, RFType> clusterer;
clusterer.setHoughBinSize (cg_size_);
clusterer.setHoughThreshold (cg_thresh_);
clusterer.setUseInterpolation (true);
clusterer.setUseDistanceWeight (false);
clusterer.setInputCloud (model_keypoints);
clusterer.setInputRf (model_rf);
clusterer.setSceneCloud (scene_keypoints);
clusterer.setSceneRf (scene_rf);
clusterer.setModelSceneCorrespondences (model_scene_corrs);
//clusterer.cluster (clustered_corrs);
clusterer.recognize (rototranslations, clustered_corrs);
}
else // Using GeometricConsistency
{
pcl::GeometricConsistencyGrouping<PointType, PointType> gc_clusterer;
gc_clusterer.setGCSize (cg_size_);
gc_clusterer.setGCThreshold (cg_thresh_);
gc_clusterer.setInputCloud (model_keypoints);
gc_clusterer.setSceneCloud (scene_keypoints);
gc_clusterer.setModelSceneCorrespondences (model_scene_corrs);
//gc_clusterer.cluster (clustered_corrs);
gc_clusterer.recognize (rototranslations, clustered_corrs);
}
//
// Output results
//
std::cout << "Model instances found: " << rototranslations.size () << std::endl;
for (std::size_t i = 0; i < rototranslations.size (); ++i)
{
std::cout << "\n Instance " << i + 1 << ":" << std::endl;
std::cout << " Correspondences belonging to this instance: " << clustered_corrs[i].size () << std::endl;
// Print the rotation matrix and translation vector
Eigen::Matrix3f rotation = rototranslations[i].block<3,3>(0, 0);
Eigen::Vector3f translation = rototranslations[i].block<3,1>(0, 3);
printf ("\n");
printf (" | %6.3f %6.3f %6.3f | \n", rotation (0,0), rotation (0,1), rotation (0,2));
printf (" R = | %6.3f %6.3f %6.3f | \n", rotation (1,0), rotation (1,1), rotation (1,2));
printf (" | %6.3f %6.3f %6.3f | \n", rotation (2,0), rotation (2,1), rotation (2,2));
printf ("\n");
printf (" t = < %0.3f, %0.3f, %0.3f >\n", translation (0), translation (1), translation (2));
}
//
// Visualization
//
pcl::visualization::PCLVisualizer viewer ("Correspondence Grouping");
viewer.addPointCloud (scene, "scene_cloud");
pcl::PointCloud<PointType>::Ptr off_scene_model (new pcl::PointCloud<PointType> ());
pcl::PointCloud<PointType>::Ptr off_scene_model_keypoints (new pcl::PointCloud<PointType> ());
if (show_correspondences_ || show_keypoints_)
{
// We are translating the model so that it doesn't end in the middle of the scene representation
pcl::transformPointCloud (*model, *off_scene_model, Eigen::Vector3f (-1,0,0), Eigen::Quaternionf (1, 0, 0, 0));
pcl::transformPointCloud (*model_keypoints, *off_scene_model_keypoints, Eigen::Vector3f (-1,0,0), Eigen::Quaternionf (1, 0, 0, 0));
pcl::visualization::PointCloudColorHandlerCustom<PointType> off_scene_model_color_handler (off_scene_model, 255, 255, 128);
viewer.addPointCloud (off_scene_model, off_scene_model_color_handler, "off_scene_model");
}
if (show_keypoints_)
{
pcl::visualization::PointCloudColorHandlerCustom<PointType> scene_keypoints_color_handler (scene_keypoints, 0, 0, 255);
viewer.addPointCloud (scene_keypoints, scene_keypoints_color_handler, "scene_keypoints");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "scene_keypoints");
pcl::visualization::PointCloudColorHandlerCustom<PointType> off_scene_model_keypoints_color_handler (off_scene_model_keypoints, 0, 0, 255);
viewer.addPointCloud (off_scene_model_keypoints, off_scene_model_keypoints_color_handler, "off_scene_model_keypoints");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "off_scene_model_keypoints");
}
for (std::size_t i = 0; i < rototranslations.size (); ++i)
{
pcl::PointCloud<PointType>::Ptr rotated_model (new pcl::PointCloud<PointType> ());
pcl::transformPointCloud (*model, *rotated_model, rototranslations[i]);
std::stringstream ss_cloud;
ss_cloud << "instance" << i;
pcl::visualization::PointCloudColorHandlerCustom<PointType> rotated_model_color_handler (rotated_model, 255, 0, 0);
viewer.addPointCloud (rotated_model, rotated_model_color_handler, ss_cloud.str ());
if (show_correspondences_)
{
for (std::size_t j = 0; j < clustered_corrs[i].size (); ++j)
{
std::stringstream ss_line;
ss_line << "correspondence_line" << i << "_" << j;
PointType& model_point = off_scene_model_keypoints->at (clustered_corrs[i][j].index_query);
PointType& scene_point = scene_keypoints->at (clustered_corrs[i][j].index_match);
// We are drawing a line for each pair of clustered correspondences found between the model and the scene
viewer.addLine<PointType, PointType> (model_point, scene_point, 0, 255, 0, ss_line.str ());
}
}
}
while (!viewer.wasStopped ())
{
viewer.spinOnce ();
}
return (0);
}
|
Walkthrough
Now let’s take a look at the various parts of the code to see how it works.
Helper Functions
Let’s start with a couple of useful functions: the first one prints on the console a short explanation of the several command line switches that the program can accept.
void
showHelp (char *filename)
{
std::cout << std::endl;
std::cout << "***************************************************************************" << std::endl;
std::cout << "* *" << std::endl;
std::cout << "* Correspondence Grouping Tutorial - Usage Guide *" << std::endl;
std::cout << "* *" << std::endl;
std::cout << "***************************************************************************" << std::endl << std::endl;
std::cout << "Usage: " << filename << " model_filename.pcd scene_filename.pcd [Options]" << std::endl << std::endl;
std::cout << "Options:" << std::endl;
std::cout << " -h: Show this help." << std::endl;
std::cout << " -k: Show used keypoints." << std::endl;
std::cout << " -c: Show used correspondences." << std::endl;
std::cout << " -r: Compute the model cloud resolution and multiply" << std::endl;
std::cout << " each radius given by that value." << std::endl;
std::cout << " --algorithm (Hough|GC): Clustering algorithm used (default Hough)." << std::endl;
std::cout << " --model_ss val: Model uniform sampling radius (default 0.01)" << std::endl;
std::cout << " --scene_ss val: Scene uniform sampling radius (default 0.03)" << std::endl;
std::cout << " --rf_rad val: Reference frame radius (default 0.015)" << std::endl;
std::cout << " --descr_rad val: Descriptor radius (default 0.02)" << std::endl;
std::cout << " --cg_size val: Cluster size (default 0.01)" << std::endl;
std::cout << " --cg_thresh val: Clustering threshold (default 5)" << std::endl << std::endl;
}
The second function does the actual parsing of the command line arguments in order to set the correct parameters for the execution.
void
parseCommandLine (int argc, char *argv[])
{
//Show help
if (pcl::console::find_switch (argc, argv, "-h"))
{
showHelp (argv[0]);
exit (0);
}
//Model & scene filenames
std::vector<int> filenames;
filenames = pcl::console::parse_file_extension_argument (argc, argv, ".pcd");
if (filenames.size () != 2)
{
std::cout << "Filenames missing.\n";
showHelp (argv[0]);
exit (-1);
}
model_filename_ = argv[filenames[0]];
scene_filename_ = argv[filenames[1]];
//Program behavior
if (pcl::console::find_switch (argc, argv, "-k"))
{
show_keypoints_ = true;
}
if (pcl::console::find_switch (argc, argv, "-c"))
{
show_correspondences_ = true;
}
if (pcl::console::find_switch (argc, argv, "-r"))
{
use_cloud_resolution_ = true;
}
std::string used_algorithm;
if (pcl::console::parse_argument (argc, argv, "--algorithm", used_algorithm) != -1)
{
if (used_algorithm.compare ("Hough") == 0)
{
use_hough_ = true;
}else if (used_algorithm.compare ("GC") == 0)
{
use_hough_ = false;
}
else
{
std::cout << "Wrong algorithm name.\n";
showHelp (argv[0]);
exit (-1);
}
}
//General parameters
pcl::console::parse_argument (argc, argv, "--model_ss", model_ss_);
pcl::console::parse_argument (argc, argv, "--scene_ss", scene_ss_);
pcl::console::parse_argument (argc, argv, "--rf_rad", rf_rad_);
pcl::console::parse_argument (argc, argv, "--descr_rad", descr_rad_);
pcl::console::parse_argument (argc, argv, "--cg_size", cg_size_);
pcl::console::parse_argument (argc, argv, "--cg_thresh", cg_thresh_);
}
It’s important to say that the only command line parameters required when executing this tutorial are the filenames of the model and the scene, in this exact order. All other parameters are set to a default value that will make the tutorial work correctly with the supplied dataset, although with different models and scene some parameter values might need to be adjusted. You can play around with them to see how they influence the final result.
You can choose between two correspondence clustering algorithms with the command line switch --algorithm (Hough|GC)
- Hough (default)
This is a clustering algorithm based on a 3D Hough voting scheme described in:
F. Tombari and L. Di Stefano: “Object recognition in 3D scenes with occlusions and clutter by Hough voting”, 4th Pacific-Rim Symposium on Image and Video Technology, 2010.
- GC
This is a geometric consistency clustering algorithm enforcing simple geometric constraints between pairs of correspondences. It builds on the proposal presented in:
H. Chen and B. Bhanu: “3D free-form object recognition in range images using local surface patches”, Pattern Recognition Letters, vol. 28, no. 10, pp. 1252-1262, 2007.
Some other interesting switches are -k, -c and -r:
-kshows the keypoints used to compute the correspondences as a blue overlay into the PCL visualizer.-cdraws a line connecting each pair of model-scene correspondences that survived the clustering process.-restimates the spatial resolution for the model point cloud and afterwards considers the radii used as parameters as if they were given in units of cloud resolution; thus achieving some sort of resolution invariance that might be useful when using this tutorial with the same command line and different point clouds.
The next function performs the spatial resolution computation for a given point cloud averaging the distance between each cloud point and its nearest neighbor.
double
computeCloudResolution (const pcl::PointCloud<PointType>::ConstPtr &cloud)
{
double res = 0.0;
int n_points = 0;
int nres;
std::vector<int> indices (2);
std::vector<float> sqr_distances (2);
pcl::search::KdTree<PointType> tree;
tree.setInputCloud (cloud);
for (std::size_t i = 0; i < cloud->size (); ++i)
{
if (! std::isfinite ((*cloud)[i].x))
{
continue;
}
//Considering the second neighbor since the first is the point itself.
nres = tree.nearestKSearch (i, 2, indices, sqr_distances);
if (nres == 2)
{
res += sqrt (sqr_distances[1]);
++n_points;
}
}
if (n_points != 0)
{
res /= n_points;
}
return res;
}
Clustering Pipeline
The main function, which performs the actual clustering, is quite straightforward. We will take a look at each part of code as they appear in the proposed example.
First, the program parses the command line arguments and loads the model and scene clouds from disk (using the filenames supplied by the user).
parseCommandLine (argc, argv);
if (pcl::io::loadPCDFile (model_filename_, *model) < 0)
{
std::cout << "Error loading model cloud." << std::endl;
showHelp (argv[0]);
return (-1);
}
if (pcl::io::loadPCDFile (scene_filename_, *scene) < 0)
{
std::cout << "Error loading scene cloud." << std::endl;
showHelp (argv[0]);
return (-1);
}
As a second step, only if resolution invariance flag has been enabled in the command line, the program adjusts the radii that will be used in the next sections by multiplying them for the estimated model cloud resolution.
if (use_cloud_resolution_)
{
float resolution = static_cast<float> (computeCloudResolution (model));
if (resolution != 0.0f)
{
model_ss_ *= resolution;
scene_ss_ *= resolution;
rf_rad_ *= resolution;
descr_rad_ *= resolution;
cg_size_ *= resolution;
}
std::cout << "Model resolution: " << resolution << std::endl;
std::cout << "Model sampling size: " << model_ss_ << std::endl;
std::cout << "Scene sampling size: " << scene_ss_ << std::endl;
std::cout << "LRF support radius: " << rf_rad_ << std::endl;
std::cout << "SHOT descriptor radius: " << descr_rad_ << std::endl;
std::cout << "Clustering bin size: " << cg_size_ << std::endl << std::endl;
}
Next, it computes the normals for each point of both the model and the scene cloud with the :pcl:`NormalEstimationOMP <pcl::NormalEstimationOMP>` estimator, using the 10 nearest neighbors of each point (this parameter seems to be fairly ok for many datasets, not just for the one provided).
pcl::NormalEstimationOMP<PointType, NormalType> norm_est;
norm_est.setKSearch (10);
norm_est.setInputCloud (model);
norm_est.compute (*model_normals);
norm_est.setInputCloud (scene);
norm_est.compute (*scene_normals);
Then it downsamples each cloud in order to find a small number of keypoints, which will then be associated to a 3D descriptor in order to perform keypoint matching and determine point-to-point correspondences. The radii used for the :pcl:`UniformSampling <pcl::UniformSampling>` are either the ones set with the command line switches or the defaults.
pcl::UniformSampling<PointType> uniform_sampling;
uniform_sampling.setInputCloud (model);
uniform_sampling.setRadiusSearch (model_ss_);
uniform_sampling.filter (*model_keypoints);
std::cout << "Model total points: " << model->size () << "; Selected Keypoints: " << model_keypoints->size () << std::endl;
uniform_sampling.setInputCloud (scene);
uniform_sampling.setRadiusSearch (scene_ss_);
uniform_sampling.filter (*scene_keypoints);
std::cout << "Scene total points: " << scene->size () << "; Selected Keypoints: " << scene_keypoints->size () << std::endl;
//
The next stage consists in associating a 3D descriptor to each model and scene keypoint. In our tutorial, we compute SHOT descriptors using :pcl:`SHOTEstimationOMP <pcl::SHOTEstimationOMP>`.
descr_est.setInputCloud (model_keypoints);
descr_est.setInputNormals (model_normals);
descr_est.setSearchSurface (model);
descr_est.compute (*model_descriptors);
descr_est.setInputCloud (scene_keypoints);
descr_est.setInputNormals (scene_normals);
descr_est.setSearchSurface (scene);
descr_est.compute (*scene_descriptors);
//
// Find Model-Scene Correspondences with KdTree
Now we need to determine point-to-point correspondences between model descriptors and scene descriptors. To do this, the program uses a :pcl:`KdTreeFLANN <pcl::KdTreeFLANN>` whose input cloud has been set to the cloud containing the model descriptors. For each descriptor associated to a scene keypoint, it efficiently finds the most similar model descriptor based on the Euclidean distance, and it adds this pair to a :pcl:`Correspondences <pcl::Correspondences>` vector (only if the two descriptors are similar enough, i.e. their squared distance is less than a threshold, set to 0.25).
match_search.setInputCloud (model_descriptors);
// For each scene keypoint descriptor, find nearest neighbor into the model keypoints descriptor cloud and add it to the correspondences vector.
for (std::size_t i = 0; i < scene_descriptors->size (); ++i)
{
std::vector<int> neigh_indices (1);
std::vector<float> neigh_sqr_dists (1);
if (!std::isfinite (scene_descriptors->at (i).descriptor[0])) //skipping NaNs
{
continue;
}
int found_neighs = match_search.nearestKSearch (scene_descriptors->at (i), 1, neigh_indices, neigh_sqr_dists);
if(found_neighs == 1 && neigh_sqr_dists[0] < 0.25f) // add match only if the squared descriptor distance is less than 0.25 (SHOT descriptor distances are between 0 and 1 by design)
{
pcl::Correspondence corr (neigh_indices[0], static_cast<int> (i), neigh_sqr_dists[0]);
model_scene_corrs->push_back (corr);
}
}
std::cout << "Correspondences found: " << model_scene_corrs->size () << std::endl;
//
// Actual Clustering
The last stage of the pipeline is the actual clustering of the previously found correspondences.
The default algorithm is :pcl:`Hough3DGrouping <pcl::Hough3DGrouping>`, that is based on an Hough Voting process. Please note that this algorithm needs to associate a Local Reference Frame (LRF) for each keypoint belonging to the clouds which are passed as arguments! In this example, we explicitly compute the set of LRFs using the :pcl:`BOARDLocalReferenceFrameEstimation <pcl::BOARDLocalReferenceFrameEstimation>` estimator before calling the clustering algorithm.
// Compute (Keypoints) Reference Frames only for Hough
//
pcl::PointCloud<RFType>::Ptr model_rf (new pcl::PointCloud<RFType> ());
pcl::PointCloud<RFType>::Ptr scene_rf (new pcl::PointCloud<RFType> ());
pcl::BOARDLocalReferenceFrameEstimation<PointType, NormalType, RFType> rf_est;
rf_est.setFindHoles (true);
rf_est.setRadiusSearch (rf_rad_);
rf_est.setInputCloud (model_keypoints);
rf_est.setInputNormals (model_normals);
rf_est.setSearchSurface (model);
rf_est.compute (*model_rf);
rf_est.setInputCloud (scene_keypoints);
rf_est.setInputNormals (scene_normals);
rf_est.setSearchSurface (scene);
rf_est.compute (*scene_rf);
// Clustering
pcl::Hough3DGrouping<PointType, PointType, RFType, RFType> clusterer;
clusterer.setHoughBinSize (cg_size_);
clusterer.setHoughThreshold (cg_thresh_);
clusterer.setUseInterpolation (true);
clusterer.setUseDistanceWeight (false);
clusterer.setInputCloud (model_keypoints);
clusterer.setInputRf (model_rf);
clusterer.setSceneCloud (scene_keypoints);
clusterer.setSceneRf (scene_rf);
clusterer.setModelSceneCorrespondences (model_scene_corrs);
//clusterer.cluster (clustered_corrs);
clusterer.recognize (rototranslations, clustered_corrs);
}
else // Using GeometricConsistency
{
pcl::GeometricConsistencyGrouping<PointType, PointType> gc_clusterer;
Note
It’s not necessary to explicitly compute the LRFs before calling the clustering algorithm. If the clouds which are fetched to the clustering algorithm do not have a set of LRFs associated, Hough3DGrouping automatically computes them before performing clustering. In particular, this happens when calling the recognize (or cluster) method without setting the LRFs: in this case you need to specify the radius of the LRF as an additional parameter for the clustering algorithm (with the setLocalRfSearchRadius method).
Alternatively to Hough3DGrouping, and by means of the appropriate command line switch described before, you might choose to employ the :pcl:`GeometricConsistencyGrouping <pcl::GeometricConsistencyGrouping>` algorithm. In this case the LRF computation is not needed so we are simply creating an instance of the algorithm class, passing the right parameters and invoking the recognize method.
gc_clusterer.setGCSize (cg_size_);
gc_clusterer.setGCThreshold (cg_thresh_);
gc_clusterer.setInputCloud (model_keypoints);
gc_clusterer.setSceneCloud (scene_keypoints);
gc_clusterer.setModelSceneCorrespondences (model_scene_corrs);
//gc_clusterer.cluster (clustered_corrs);
gc_clusterer.recognize (rototranslations, clustered_corrs);
}
//
// Output results
Note
The recognize method returns a vector of Eigen::Matrix4f representing a transformation (rotation + translation) for each instance of the model found in the scene (obtained via Absolute Orientation) and a vector of :pcl:`Correspondences <pcl::Correspondences>` (a vector of vectors of :pcl:`Correspondence <pcl::Correspondences>`) representing the output of the clustering i.e. each element of this vector is in turn a set of correspondences, representing the correspondences associated to a specific model instance in the scene.
If you only need the clustered correspondences because you are planning to use them in a different way, you can use the cluster method.
Output and Visualization
We are almost at the end of this tutorial. The last few words are related to the part of the program that displays the results on the console and over a PCL Visualizer window.
As a first thing we are showing, for each instance of the model found into the scene, the transformation matrix and the number of correspondences extracted by the clustering method.
std::cout << "\n Instance " << i + 1 << ":" << std::endl;
std::cout << " Correspondences belonging to this instance: " << clustered_corrs[i].size () << std::endl;
// Print the rotation matrix and translation vector
Eigen::Matrix3f rotation = rototranslations[i].block<3,3>(0, 0);
Eigen::Vector3f translation = rototranslations[i].block<3,1>(0, 3);
printf ("\n");
printf (" | %6.3f %6.3f %6.3f | \n", rotation (0,0), rotation (0,1), rotation (0,2));
printf (" R = | %6.3f %6.3f %6.3f | \n", rotation (1,0), rotation (1,1), rotation (1,2));
printf (" | %6.3f %6.3f %6.3f | \n", rotation (2,0), rotation (2,1), rotation (2,2));
printf ("\n");
printf (" t = < %0.3f, %0.3f, %0.3f >\n", translation (0), translation (1), translation (2));
}
//
// Visualization
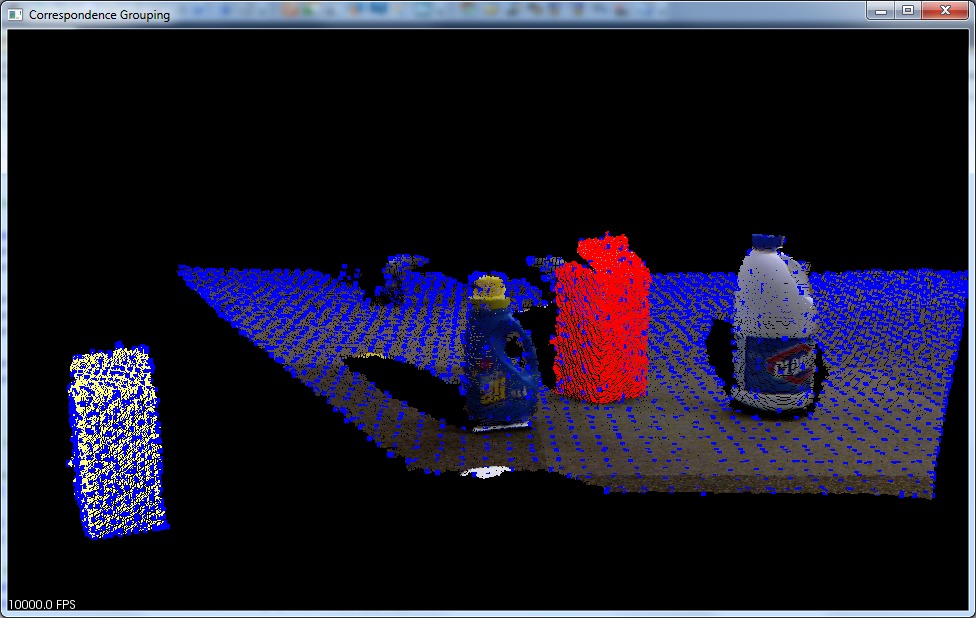
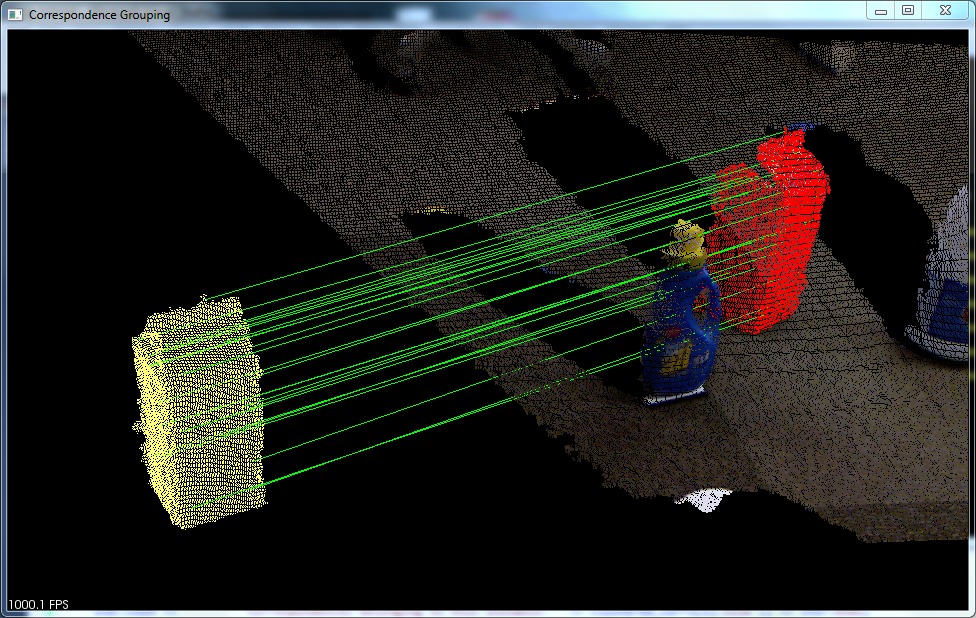
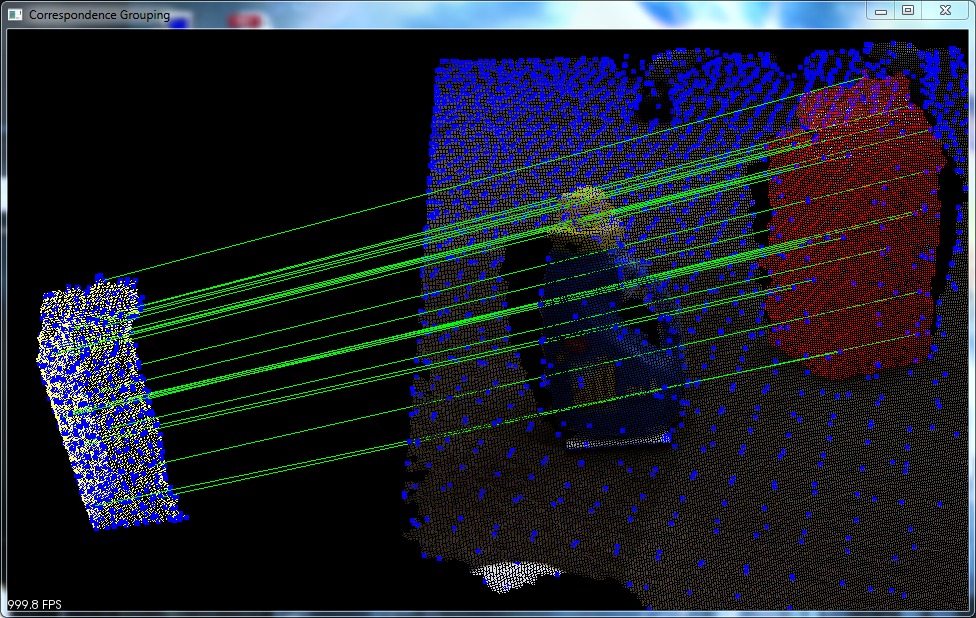
The program then shows in a :pcl:`PCLVisualizer <pcl::visualization::PCLVisualizer>` window the scene cloud with a red overlay where an instance of the model has been found.
If the command line switches -k and -c have been used, the program also shows a “stand-alone” rendering of the model cloud. If keypoint visualization is enabled, keypoints are displayed as blue dots and if correspondence visualization has been enabled they are shown as a green line for each correspondence which survived the clustering process.
pcl::PointCloud<PointType>::Ptr off_scene_model (new pcl::PointCloud<PointType> ());
pcl::PointCloud<PointType>::Ptr off_scene_model_keypoints (new pcl::PointCloud<PointType> ());
if (show_correspondences_ || show_keypoints_)
{
// We are translating the model so that it doesn't end in the middle of the scene representation
pcl::transformPointCloud (*model, *off_scene_model, Eigen::Vector3f (-1,0,0), Eigen::Quaternionf (1, 0, 0, 0));
pcl::transformPointCloud (*model_keypoints, *off_scene_model_keypoints, Eigen::Vector3f (-1,0,0), Eigen::Quaternionf (1, 0, 0, 0));
pcl::visualization::PointCloudColorHandlerCustom<PointType> off_scene_model_color_handler (off_scene_model, 255, 255, 128);
viewer.addPointCloud (off_scene_model, off_scene_model_color_handler, "off_scene_model");
}
if (show_keypoints_)
{
pcl::visualization::PointCloudColorHandlerCustom<PointType> scene_keypoints_color_handler (scene_keypoints, 0, 0, 255);
viewer.addPointCloud (scene_keypoints, scene_keypoints_color_handler, "scene_keypoints");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "scene_keypoints");
pcl::visualization::PointCloudColorHandlerCustom<PointType> off_scene_model_keypoints_color_handler (off_scene_model_keypoints, 0, 0, 255);
viewer.addPointCloud (off_scene_model_keypoints, off_scene_model_keypoints_color_handler, "off_scene_model_keypoints");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "off_scene_model_keypoints");
}
for (std::size_t i = 0; i < rototranslations.size (); ++i)
{
pcl::PointCloud<PointType>::Ptr rotated_model (new pcl::PointCloud<PointType> ());
pcl::transformPointCloud (*model, *rotated_model, rototranslations[i]);
std::stringstream ss_cloud;
ss_cloud << "instance" << i;
pcl::visualization::PointCloudColorHandlerCustom<PointType> rotated_model_color_handler (rotated_model, 255, 0, 0);
viewer.addPointCloud (rotated_model, rotated_model_color_handler, ss_cloud.str ());
if (show_correspondences_)
{
for (std::size_t j = 0; j < clustered_corrs[i].size (); ++j)
{
std::stringstream ss_line;
ss_line << "correspondence_line" << i << "_" << j;
PointType& model_point = off_scene_model_keypoints->at (clustered_corrs[i][j].index_query);
PointType& scene_point = scene_keypoints->at (clustered_corrs[i][j].index_match);
// We are drawing a line for each pair of clustered correspondences found between the model and the scene
viewer.addLine<PointType, PointType> (model_point, scene_point, 0, 255, 0, ss_line.str ());
}
}
}
while (!viewer.wasStopped ())
{
viewer.spinOnce ();
}
return (0);
}
Compiling and running the program
Create a CMakeLists.txt file and add the following lines into it:
1 2 3 4 5 6 7 8 9 10 11 12 | cmake_minimum_required(VERSION 2.6 FATAL_ERROR)
project(correspondence_grouping)
find_package(PCL 1.5 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (correspondence_grouping correspondence_grouping.cpp)
target_link_libraries (correspondence_grouping ${PCL_LIBRARIES})
|
After you have created the executable, you can then launch it following this example:
$ ./correspondence_grouping milk.pcd milk_cartoon_all_small_clorox.pcd
Or, alternatively, if you prefer specifying the radii in units of cloud resolution:
$ ./correspondence_grouping milk.pcd milk_cartoon_all_small_clorox.pcd milk.pcd milk_cartoon_all_small_clorox.pcd -r --model_ss 7.5 --scene_ss 20 --rf_rad 10 --descr_rad 15 --cg_size 10
Remember to replace milk.pcd and milk_cartoon_all_small_clorox.pcd with model and scene filenames, in this exact order. If you want you can add other command line options as described at the beginning of this tutorial.
Note
If you are using different point clouds and you don’t know how to set the various parameters for this tutorial you can use the -r flag and try setting the LRF and descriptor radii to 5, 10, 15 or 20 times the actual cloud resolution. After that you probably will have to tweak the values by hand to achieve the best results.
After a few seconds, you will see an output similar to:
Model total points: 13704; Selected Keypoints: 732
Scene total points: 307200; Selected Keypoints: 3747
Correspondences found: 1768
Model instances found: 1
Instance 1:
Correspondences belonging to this instance: 24
| 0.969 -0.120 0.217 |
R = | 0.117 0.993 0.026 |
| -0.218 -0.000 0.976 |
t = < -0.159, 0.212, -0.042 >
The output window should look like this (depending on the command line options used):