How to incrementally register pairs of clouds
This document demonstrates using the Iterative Closest Point algorithm in order to incrementally register a series of point clouds two by two.
The code
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 | /*
* Software License Agreement (BSD License)
*
* Copyright (c) 2010, Willow Garage, Inc.
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
* * Redistributions in binary form must reproduce the above
* copyright notice, this list of conditions and the following
* disclaimer in the documentation and/or other materials provided
* with the distribution.
* * Neither the name of Willow Garage, Inc. nor the names of its
* contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
* LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*
* $Id$
*
*/
/* \author Radu Bogdan Rusu
* adaptation Raphael Favier*/
#include <pcl/memory.h> // for pcl::make_shared
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/point_representation.h>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/filters/filter.h>
#include <pcl/features/normal_3d.h>
#include <pcl/registration/icp.h>
#include <pcl/registration/icp_nl.h>
#include <pcl/registration/transforms.h>
#include <pcl/visualization/pcl_visualizer.h>
using pcl::visualization::PointCloudColorHandlerGenericField;
using pcl::visualization::PointCloudColorHandlerCustom;
//convenient typedefs
typedef pcl::PointXYZ PointT;
typedef pcl::PointCloud<PointT> PointCloud;
typedef pcl::PointNormal PointNormalT;
typedef pcl::PointCloud<PointNormalT> PointCloudWithNormals;
// This is a tutorial so we can afford having global variables
//our visualizer
pcl::visualization::PCLVisualizer *p;
//its left and right viewports
int vp_1, vp_2;
//convenient structure to handle our pointclouds
struct PCD
{
PointCloud::Ptr cloud;
std::string f_name;
PCD() : cloud (new PointCloud) {};
};
struct PCDComparator
{
bool operator () (const PCD& p1, const PCD& p2)
{
return (p1.f_name < p2.f_name);
}
};
// Define a new point representation for < x, y, z, curvature >
class MyPointRepresentation : public pcl::PointRepresentation <PointNormalT>
{
using pcl::PointRepresentation<PointNormalT>::nr_dimensions_;
public:
MyPointRepresentation ()
{
// Define the number of dimensions
nr_dimensions_ = 4;
}
// Override the copyToFloatArray method to define our feature vector
virtual void copyToFloatArray (const PointNormalT &p, float * out) const
{
// < x, y, z, curvature >
out[0] = p.x;
out[1] = p.y;
out[2] = p.z;
out[3] = p.curvature;
}
};
////////////////////////////////////////////////////////////////////////////////
/** \brief Display source and target on the first viewport of the visualizer
*
*/
void showCloudsLeft(const PointCloud::Ptr cloud_target, const PointCloud::Ptr cloud_source)
{
p->removePointCloud ("vp1_target");
p->removePointCloud ("vp1_source");
PointCloudColorHandlerCustom<PointT> tgt_h (cloud_target, 0, 255, 0);
PointCloudColorHandlerCustom<PointT> src_h (cloud_source, 255, 0, 0);
p->addPointCloud (cloud_target, tgt_h, "vp1_target", vp_1);
p->addPointCloud (cloud_source, src_h, "vp1_source", vp_1);
PCL_INFO ("Press q to begin the registration.\n");
p-> spin();
}
////////////////////////////////////////////////////////////////////////////////
/** \brief Display source and target on the second viewport of the visualizer
*
*/
void showCloudsRight(const PointCloudWithNormals::Ptr cloud_target, const PointCloudWithNormals::Ptr cloud_source)
{
p->removePointCloud ("source");
p->removePointCloud ("target");
PointCloudColorHandlerGenericField<PointNormalT> tgt_color_handler (cloud_target, "curvature");
if (!tgt_color_handler.isCapable ())
PCL_WARN ("Cannot create curvature color handler!");
PointCloudColorHandlerGenericField<PointNormalT> src_color_handler (cloud_source, "curvature");
if (!src_color_handler.isCapable ())
PCL_WARN ("Cannot create curvature color handler!");
p->addPointCloud (cloud_target, tgt_color_handler, "target", vp_2);
p->addPointCloud (cloud_source, src_color_handler, "source", vp_2);
p->spinOnce();
}
////////////////////////////////////////////////////////////////////////////////
/** \brief Load a set of PCD files that we want to register together
* \param argc the number of arguments (pass from main ())
* \param argv the actual command line arguments (pass from main ())
* \param models the resultant vector of point cloud datasets
*/
void loadData (int argc, char **argv, std::vector<PCD, Eigen::aligned_allocator<PCD> > &models)
{
std::string extension (".pcd");
// Suppose the first argument is the actual test model
for (int i = 1; i < argc; i++)
{
std::string fname = std::string (argv[i]);
// Needs to be at least 5: .plot
if (fname.size () <= extension.size ())
continue;
std::transform (fname.begin (), fname.end (), fname.begin (), (int(*)(int))tolower);
//check that the argument is a pcd file
if (fname.compare (fname.size () - extension.size (), extension.size (), extension) == 0)
{
// Load the cloud and saves it into the global list of models
PCD m;
m.f_name = argv[i];
pcl::io::loadPCDFile (argv[i], *m.cloud);
//remove NAN points from the cloud
std::vector<int> indices;
pcl::removeNaNFromPointCloud(*m.cloud,*m.cloud, indices);
models.push_back (m);
}
}
}
////////////////////////////////////////////////////////////////////////////////
/** \brief Align a pair of PointCloud datasets and return the result
* \param cloud_src the source PointCloud
* \param cloud_tgt the target PointCloud
* \param output the resultant aligned source PointCloud
* \param final_transform the resultant transform between source and target
*/
void pairAlign (const PointCloud::Ptr cloud_src, const PointCloud::Ptr cloud_tgt, PointCloud::Ptr output, Eigen::Matrix4f &final_transform, bool downsample = false)
{
//
// Downsample for consistency and speed
// \note enable this for large datasets
PointCloud::Ptr src (new PointCloud);
PointCloud::Ptr tgt (new PointCloud);
pcl::VoxelGrid<PointT> grid;
if (downsample)
{
grid.setLeafSize (0.05, 0.05, 0.05);
grid.setInputCloud (cloud_src);
grid.filter (*src);
grid.setInputCloud (cloud_tgt);
grid.filter (*tgt);
}
else
{
src = cloud_src;
tgt = cloud_tgt;
}
// Compute surface normals and curvature
PointCloudWithNormals::Ptr points_with_normals_src (new PointCloudWithNormals);
PointCloudWithNormals::Ptr points_with_normals_tgt (new PointCloudWithNormals);
pcl::NormalEstimation<PointT, PointNormalT> norm_est;
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZ> ());
norm_est.setSearchMethod (tree);
norm_est.setKSearch (30);
norm_est.setInputCloud (src);
norm_est.compute (*points_with_normals_src);
pcl::copyPointCloud (*src, *points_with_normals_src);
norm_est.setInputCloud (tgt);
norm_est.compute (*points_with_normals_tgt);
pcl::copyPointCloud (*tgt, *points_with_normals_tgt);
//
// Instantiate our custom point representation (defined above) ...
MyPointRepresentation point_representation;
// ... and weight the 'curvature' dimension so that it is balanced against x, y, and z
float alpha[4] = {1.0, 1.0, 1.0, 1.0};
point_representation.setRescaleValues (alpha);
//
// Align
pcl::IterativeClosestPointNonLinear<PointNormalT, PointNormalT> reg;
reg.setTransformationEpsilon (1e-6);
// Set the maximum distance between two correspondences (src<->tgt) to 10cm
// Note: adjust this based on the size of your datasets
reg.setMaxCorrespondenceDistance (0.1);
// Set the point representation
reg.setPointRepresentation (pcl::make_shared<const MyPointRepresentation> (point_representation));
reg.setInputSource (points_with_normals_src);
reg.setInputTarget (points_with_normals_tgt);
//
// Run the same optimization in a loop and visualize the results
Eigen::Matrix4f Ti = Eigen::Matrix4f::Identity (), prev, targetToSource;
PointCloudWithNormals::Ptr reg_result = points_with_normals_src;
reg.setMaximumIterations (2);
for (int i = 0; i < 30; ++i)
{
PCL_INFO ("Iteration Nr. %d.\n", i);
// save cloud for visualization purpose
points_with_normals_src = reg_result;
// Estimate
reg.setInputSource (points_with_normals_src);
reg.align (*reg_result);
//accumulate transformation between each Iteration
Ti = reg.getFinalTransformation () * Ti;
//if the difference between this transformation and the previous one
//is smaller than the threshold, refine the process by reducing
//the maximal correspondence distance
if (std::abs ((reg.getLastIncrementalTransformation () - prev).sum ()) < reg.getTransformationEpsilon ())
reg.setMaxCorrespondenceDistance (reg.getMaxCorrespondenceDistance () - 0.001);
prev = reg.getLastIncrementalTransformation ();
// visualize current state
showCloudsRight(points_with_normals_tgt, points_with_normals_src);
}
//
// Get the transformation from target to source
targetToSource = Ti.inverse();
//
// Transform target back in source frame
pcl::transformPointCloud (*cloud_tgt, *output, targetToSource);
p->removePointCloud ("source");
p->removePointCloud ("target");
PointCloudColorHandlerCustom<PointT> cloud_tgt_h (output, 0, 255, 0);
PointCloudColorHandlerCustom<PointT> cloud_src_h (cloud_src, 255, 0, 0);
p->addPointCloud (output, cloud_tgt_h, "target", vp_2);
p->addPointCloud (cloud_src, cloud_src_h, "source", vp_2);
PCL_INFO ("Press q to continue the registration.\n");
p->spin ();
p->removePointCloud ("source");
p->removePointCloud ("target");
//add the source to the transformed target
*output += *cloud_src;
final_transform = targetToSource;
}
/* ---[ */
int main (int argc, char** argv)
{
// Load data
std::vector<PCD, Eigen::aligned_allocator<PCD> > data;
loadData (argc, argv, data);
// Check user input
if (data.empty ())
{
PCL_ERROR ("Syntax is: %s <source.pcd> <target.pcd> [*]", argv[0]);
PCL_ERROR ("[*] - multiple files can be added. The registration results of (i, i+1) will be registered against (i+2), etc");
return (-1);
}
PCL_INFO ("Loaded %d datasets.", (int)data.size ());
// Create a PCLVisualizer object
p = new pcl::visualization::PCLVisualizer (argc, argv, "Pairwise Incremental Registration example");
p->createViewPort (0.0, 0, 0.5, 1.0, vp_1);
p->createViewPort (0.5, 0, 1.0, 1.0, vp_2);
PointCloud::Ptr result (new PointCloud), source, target;
Eigen::Matrix4f GlobalTransform = Eigen::Matrix4f::Identity (), pairTransform;
for (std::size_t i = 1; i < data.size (); ++i)
{
source = data[i-1].cloud;
target = data[i].cloud;
// Add visualization data
showCloudsLeft(source, target);
PointCloud::Ptr temp (new PointCloud);
PCL_INFO ("Aligning %s (%zu) with %s (%zu).\n", data[i-1].f_name.c_str (), static_cast<std::size_t>(source->size ()), data[i].f_name.c_str (), static_cast<std::size_t>(target->size ()));
pairAlign (source, target, temp, pairTransform, true);
//transform current pair into the global transform
pcl::transformPointCloud (*temp, *result, GlobalTransform);
//update the global transform
GlobalTransform *= pairTransform;
//save aligned pair, transformed into the first cloud's frame
std::stringstream ss;
ss << i << ".pcd";
pcl::io::savePCDFile (ss.str (), *result, true);
}
}
/* ]--- */
|
The explanation
Declarations
These are the header files that contain the definitions for all of the classes which we will use.
#include <pcl/memory.h> // for pcl::make_shared
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/point_representation.h>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/filters/filter.h>
#include <pcl/features/normal_3d.h>
#include <pcl/registration/icp.h>
#include <pcl/registration/icp_nl.h>
#include <pcl/registration/transforms.h>
#include <pcl/visualization/pcl_visualizer.h>
Creates global variables for visualization purpose
// This is a tutorial so we can afford having global variables
//our visualizer
pcl::visualization::PCLVisualizer *p;
//its left and right viewports
int vp_1, vp_2;
Declare a convenient structure that allow us to handle clouds as couple [points - filename]
struct PCD
{
PointCloud::Ptr cloud;
std::string f_name;
PCD() : cloud (new PointCloud) {};
};
Define a new point representation (see Adding your own custom PointT type for more on the subject)
// Define a new point representation for < x, y, z, curvature >
class MyPointRepresentation : public pcl::PointRepresentation <PointNormalT>
{
using pcl::PointRepresentation<PointNormalT>::nr_dimensions_;
public:
MyPointRepresentation ()
{
// Define the number of dimensions
nr_dimensions_ = 4;
}
// Override the copyToFloatArray method to define our feature vector
virtual void copyToFloatArray (const PointNormalT &p, float * out) const
{
// < x, y, z, curvature >
out[0] = p.x;
out[1] = p.y;
out[2] = p.z;
out[3] = p.curvature;
}
};
Registering functions
Let’s see how are our functions organized.
int main (int argc, char** argv)
{
// Load data
std::vector<PCD, Eigen::aligned_allocator<PCD> > data;
loadData (argc, argv, data);
// Check user input
if (data.empty ())
{
PCL_ERROR ("Syntax is: %s <source.pcd> <target.pcd> [*]", argv[0]);
PCL_ERROR ("[*] - multiple files can be added. The registration results of (i, i+1) will be registered against (i+2), etc");
return (-1);
}
PCL_INFO ("Loaded %d datasets.", (int)data.size ());
// Create a PCLVisualizer object
p = new pcl::visualization::PCLVisualizer (argc, argv, "Pairwise Incremental Registration example");
p->createViewPort (0.0, 0, 0.5, 1.0, vp_1);
p->createViewPort (0.5, 0, 1.0, 1.0, vp_2);
PointCloud::Ptr result (new PointCloud), source, target;
Eigen::Matrix4f GlobalTransform = Eigen::Matrix4f::Identity (), pairTransform;
for (std::size_t i = 1; i < data.size (); ++i)
{
source = data[i-1].cloud;
target = data[i].cloud;
// Add visualization data
showCloudsLeft(source, target);
PointCloud::Ptr temp (new PointCloud);
PCL_INFO ("Aligning %s (%zu) with %s (%zu).\n", data[i-1].f_name.c_str (), static_cast<std::size_t>(source->size ()), data[i].f_name.c_str (), static_cast<std::size_t>(target->size ()));
pairAlign (source, target, temp, pairTransform, true);
//transform current pair into the global transform
pcl::transformPointCloud (*temp, *result, GlobalTransform);
//update the global transform
GlobalTransform *= pairTransform;
//save aligned pair, transformed into the first cloud's frame
std::stringstream ss;
ss << i << ".pcd";
pcl::io::savePCDFile (ss.str (), *result, true);
}
}
/* ]--- */
void loadData (int argc, char **argv, std::vector<PCD, Eigen::aligned_allocator<PCD> > &models)
{
std::string extension (".pcd");
// Suppose the first argument is the actual test model
for (int i = 1; i < argc; i++)
{
std::string fname = std::string (argv[i]);
// Needs to be at least 5: .plot
if (fname.size () <= extension.size ())
continue;
std::transform (fname.begin (), fname.end (), fname.begin (), (int(*)(int))tolower);
//check that the argument is a pcd file
if (fname.compare (fname.size () - extension.size (), extension.size (), extension) == 0)
{
// Load the cloud and saves it into the global list of models
PCD m;
m.f_name = argv[i];
pcl::io::loadPCDFile (argv[i], *m.cloud);
//remove NAN points from the cloud
std::vector<int> indices;
pcl::removeNaNFromPointCloud(*m.cloud,*m.cloud, indices);
models.push_back (m);
}
}
}
We now arrive to the actual pair registration.
void pairAlign (const PointCloud::Ptr cloud_src, const PointCloud::Ptr cloud_tgt, PointCloud::Ptr output, Eigen::Matrix4f &final_transform, bool downsample = false)
// Align pcl::IterativeClosestPointNonLinear<PointNormalT, PointNormalT> reg; reg.setTransformationEpsilon (1e-6); // Set the maximum distance between two correspondences (src<->tgt) to 10cm // Note: adjust this based on the size of your datasets reg.setMaxCorrespondenceDistance (0.1); // Set the point representation reg.setPointRepresentation (boost::make_shared<const MyPointRepresentation> (point_representation)); reg.setInputCloud (points_with_normals_src); reg.setInputTarget (points_with_normals_tgt);
reg.setMaximumIterations (2);
And is manually iterated (30 times in our case):
for (int i = 0; i < 30; ++i) { [...] points_with_normals_src = reg_result; // Estimate reg.setInputCloud (points_with_normals_src); reg.align (*reg_result); [...] }
During each iteration, we keep track of and accumulate the transformations returned by the ICP:
Eigen::Matrix4f Ti = Eigen::Matrix4f::Identity (), prev, targetToSource; [...] for (int i = 0; i < 30; ++i) { [...] Ti = reg.getFinalTransformation () * Ti; [...] }
for (int i = 0; i < 30; ++i) { [...] if (std::abs ((reg.getLastIncrementalTransformation () - prev).sum ()) < reg.getTransformationEpsilon ()) reg.setMaxCorrespondenceDistance (reg.getMaxCorrespondenceDistance () - 0.001); prev = reg.getLastIncrementalTransformation (); [...] }
// // Get the transformation from target to source targetToSource = Ti.inverse(); // // Transform target back in source frame pcl::transformPointCloud (*cloud_tgt, *output, targetToSource); [...] *output += *cloud_tgt; final_transform = targetToSource;
Compiling and running the program
Create a file named pairwise_incremental_registration.cpp and paste the full code in it.
Create CMakeLists.txt file and add the following line in it:
1 2 3 4 5 6 7 8 9 10 11 12 | cmake_minimum_required(VERSION 2.6 FATAL_ERROR)
project(tuto-pairwise)
find_package(PCL 1.4 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (pairwise_incremental_registration pairwise_incremental_registration.cpp)
target_link_libraries (pairwise_incremental_registration ${PCL_LIBRARIES})
|
Copy the files from github.com/PointCloudLibrary/data/tree/master/tutorials/pairwise in your working folder.
After you have made the executable (cmake ., make), you can run it. Simply do:
$ ./pairwise_incremental_registration capture000[1-5].pcd
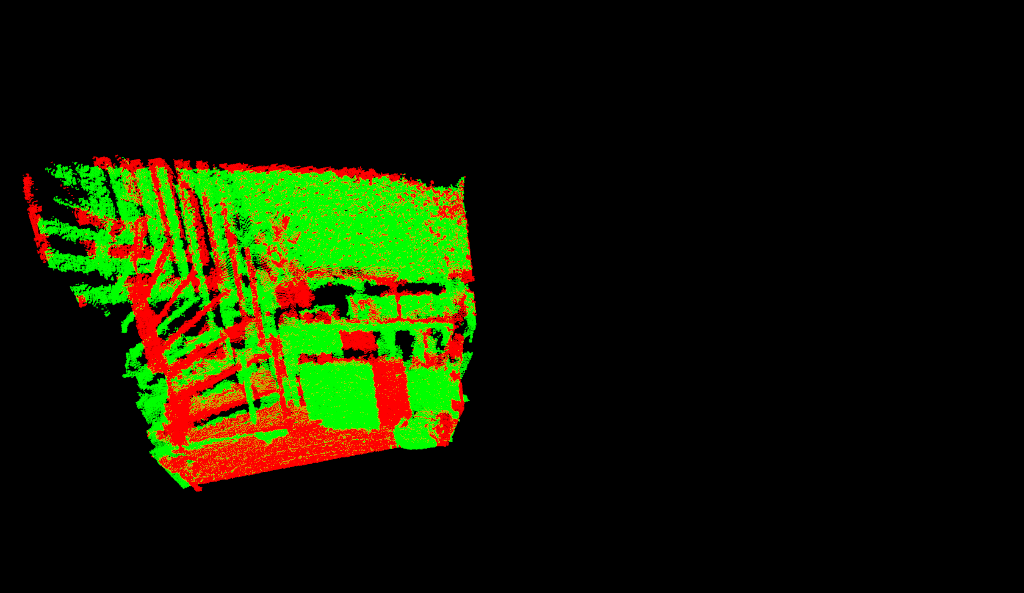
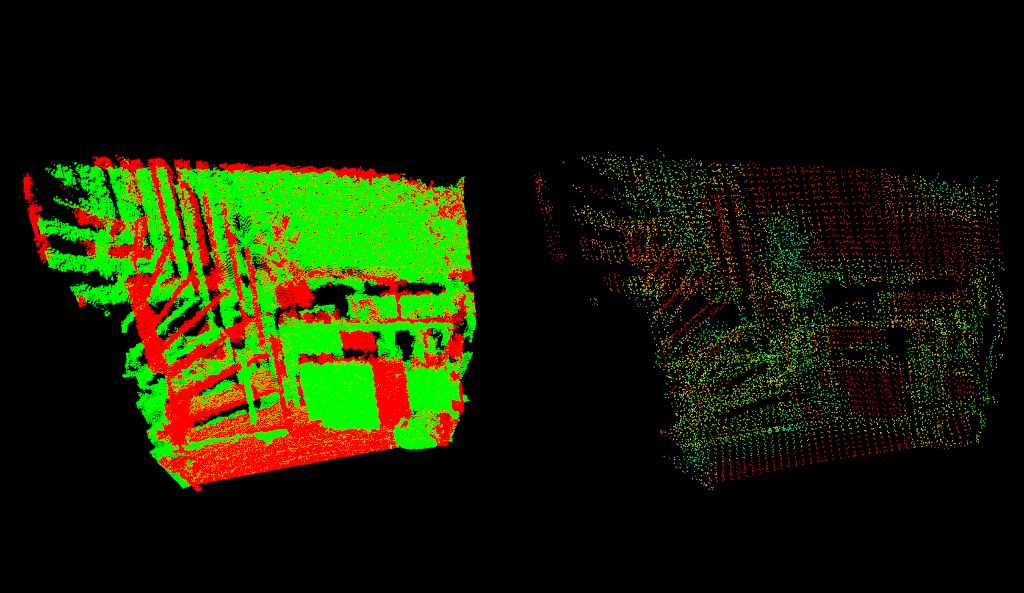
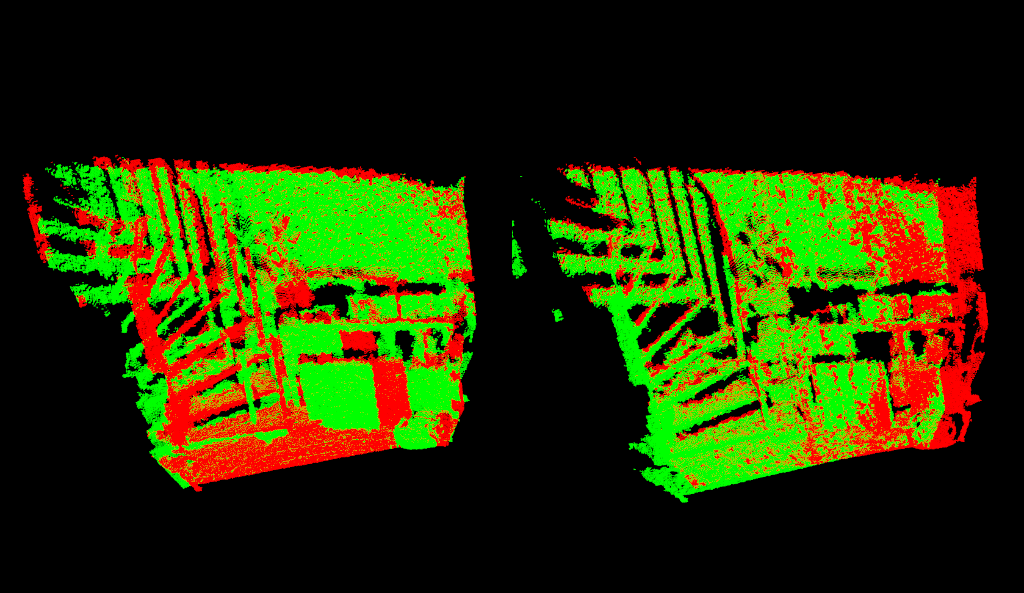
You will see something similar to:
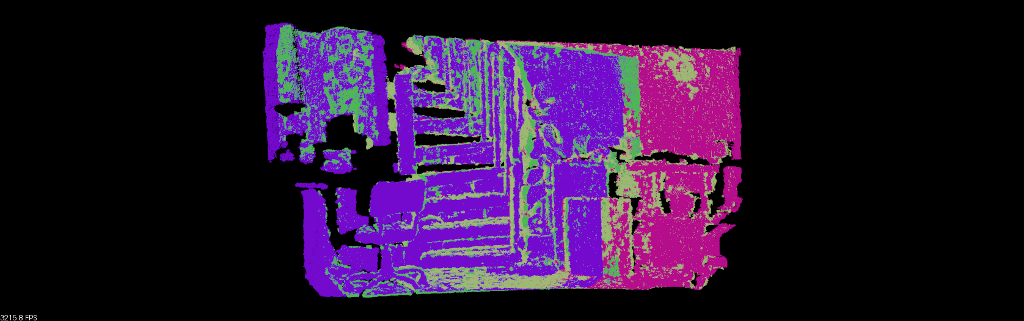
Visualize the final results by running:
$ pcl_viewer 1.pcd 2.pcd 3.pcd 4.pcd
NOTE: if you only see a black screen in your viewer, try adjusting the camera position with your mouse. This may happen with the sample PCD files of this tutorial.