Introduction
The following links describe a set of basic PCL tutorials. Please note that their source codes may already be provided as part of the PCL regular releases, so check there before you start copy & pasting the code. The list of tutorials below is automatically generated from reST files located in our git repository.
Note
Before you start reading, please make sure that you go through the higher-level overview documentation at http://www.pointclouds.org/documentation/, under Getting Started. Thank you.
As always, we would be happy to hear your comments and receive your contributions on any tutorial.
Basic Usage
Title: PCL Functionality Walkthrough
Author: Razvan G. Mihalyi
Compatibility: > PCL 1.6
Takes the reader through all of the PCL modules and offers basic explanations on their functionalities.
Getting Started / Basic Structures
Title: Getting Started / Basic Structures
Author: Radu B. Rusu
Compatibility: > PCL 1.0
Presents the basic data structures in PCL and discusses their usage with a simple code example.
Title: Using PCL in your own project
Author: Nizar Sallem
Compatibility: > PCL 1.0
In this tutorial, we will learn how to link your own project to PCL using cmake.
Compiling PCL from source on POSIX compliant systems
Title: Compiling PCL from source on POSIX compliant systems
Author: Victor Lamoine
Compatibility: > PCL 1.0
In this tutorial, we will explain how to compile PCL from sources on POSIX/Unix systems.
Customizing the PCL build process
Title: Explaining PCL’s cmake options
Author: Nizar Sallem
Compatibility: > PCL 1.0
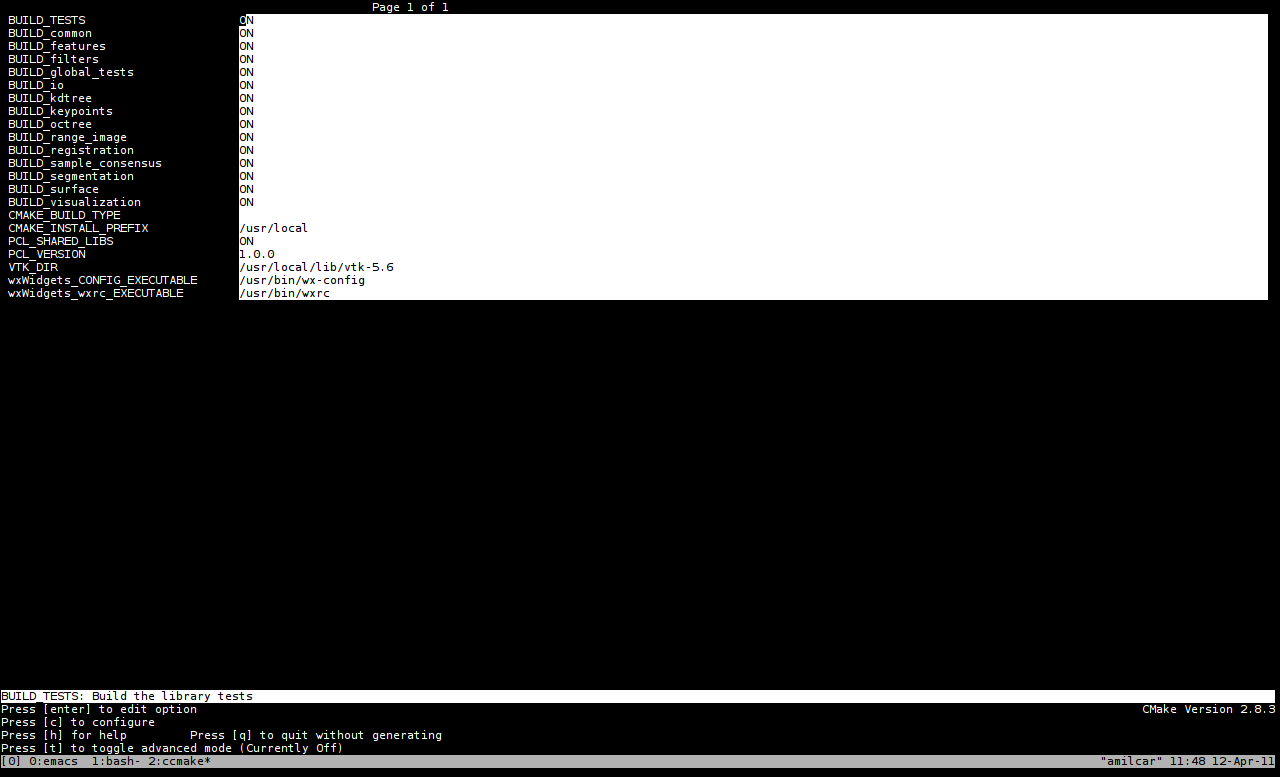
In this tutorial, we will explain the basic PCL cmake options, and ways to tweak them to fit your project.
Building PCL’s dependencies from source on Windows
Title: Compiling PCL’s dependencies from source on Windows
Authors: Alessio Placitelli and Mourad Boufarguine
Compatibility: > PCL 1.0
In this tutorial, we will explain how to compile PCL’s 3rd party dependencies from source on Microsoft Windows.
Compiling PCL from source on Windows
Title: Compiling PCL on Windows
Author: Mourad Boufarguine
Compatibility: > PCL 1.0
In this tutorial, we will explain how to compile PCL on Microsoft Windows.
Compiling PCL and its dependencies from MacPorts and source on Mac OS X
Title: Compiling PCL and its dependencies from MacPorts and source on Mac OS X
Author: Justin Rosen
Compatibility: > PCL 1.0
This tutorial explains how to build the Point Cloud Library from MacPorts and source on Mac OS X platforms.
Installing on Mac OS X using Homebrew
Title: Installing on Mac OS X using Homebrew
Author: Geoffrey Biggs
Compatibility: > PCL 1.2
This tutorial explains how to install the Point Cloud Library on Mac OS X using Homebrew. Both direct installation and compiling PCL from source are explained.
Title: Using Eclipse as your PCL editor
Author: Koen Buys
Compatibility: PCL git master
This tutorial shows you how to get your PCL as a project in Eclipse.
Generate a local documentation for PCL
Title: Generate a local documentation for PCL
Author: Victor Lamoine
Compatibility: PCL > 1.0
This tutorial shows you how to generate and use a local documentation for PCL.
Using a matrix to transform a point cloud
Title: Using matrixes to transform a point cloud
Author: Victor Lamoine
Compatibility: > PCL 1.5
This tutorial shows you how to transform a point cloud using a matrix.

Advanced Usage
Adding your own custom PointT type
Title: Adding your own custom PointT point type
Author: Radu B. Rusu
Compatibility: > PCL 0.9, < PCL 2.0
This document explains what templated point types are in PCL, why do they exist, and how to create and use your own PointT point type.
Title: Writing a new PCL class
Author: Radu B. Rusu, Luca Penasa
Compatibility: > PCL 0.9, < PCL 2.0
This short guide is to serve as both a HowTo and a FAQ for writing new PCL classes, either from scratch, or by adapting old code.
Features
Title: How 3D features work
Author: Radu B. Rusu
Compatibility: > PCL 1.0
This document presents a basic introduction to the 3D feature estimation methodologies in PCL.
Estimating Surface Normals in a PointCloud
Title: Estimating Surface Normals in a PointCloud
Author: Radu B. Rusu
Compatibility: > PCL 1.0
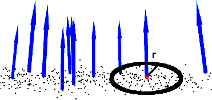
This tutorial discusses the theoretical and implementation details of the surface normal estimation module in PCL.
Normal Estimation Using Integral Images
Title: Normal Estimation Using Integral Images
Author: Stefan Holzer
Compatibility: > PCL 1.0
In this tutorial we will learn how to compute normals for an organized point cloud using integral images.
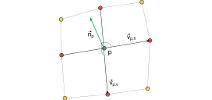
Point Feature Histograms (PFH) descriptors
Title: Point Feature Histograms (PFH) descriptors
Author: Radu B. Rusu
Compatibility: > PCL 1.0
This tutorial introduces a family of 3D feature descriptors called PFH (Point Feature Histograms) and discusses their implementation details from PCL’s perspective.
Fast Point Feature Histograms (FPFH) descriptors
Title: Fast Point Feature Histograms (FPFH) descriptors
Author: Radu B. Rusu
Compatibility: > PCL 1.3
This tutorial introduces the FPFH (Fast Point Feature Histograms) 3D descriptor and discusses their implementation details from PCL’s perspective.
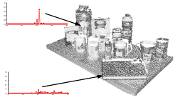
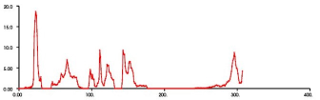
Estimating VFH signatures for a set of points
Title: Estimating VFH signatures for a set of points
Author: Radu B. Rusu
Compatibility: > PCL 0.8
This document describes the Viewpoint Feature Histogram (VFH) descriptor, a novel representation for point clusters for the problem of Cluster (e.g., Object) Recognition and 6DOF Pose Estimation.
How to extract NARF Features from a range image
Title: How to extract NARF features from a range image
Author: Bastian Steder
Compatibility: > 1.3
In this tutorial, we will learn how to extract NARF features from a range image.
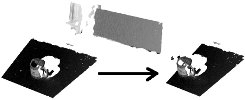
Moment of inertia and eccentricity based descriptors
Title: Moment of inertia and eccentricity based descriptors
Author: Sergey Ushakov
Compatibility: > PCL 1.7
In this tutorial we will learn how to compute moment of inertia and eccentricity of the cloud. In addition to this we will learn how to extract AABB and OBB.
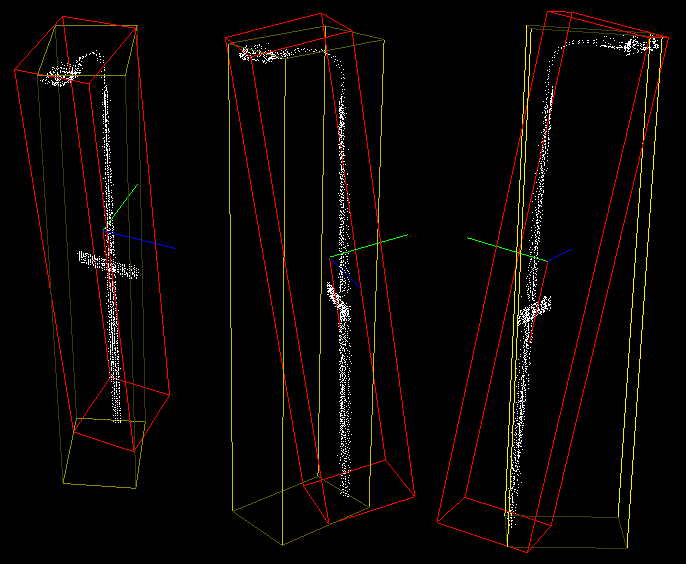
RoPs (Rotational Projection Statistics) feature
Title: RoPs (Rotational Projection Statistics) feature
Author: Sergey Ushakov
Compatibility: > PCL 1.7
In this tutorial we will learn how to compute RoPS feature.
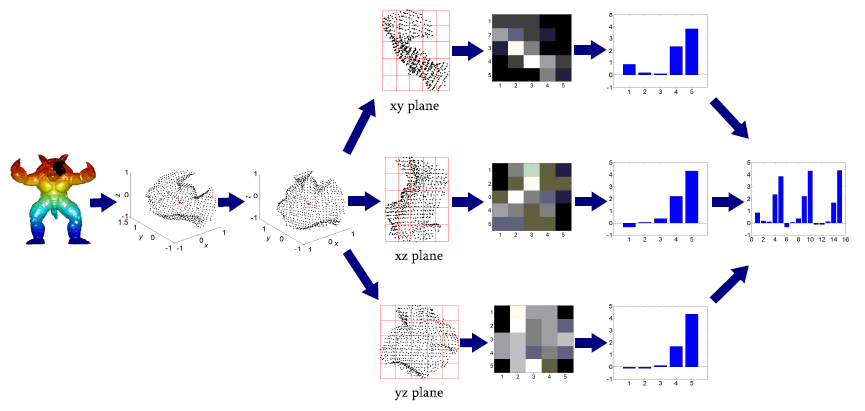
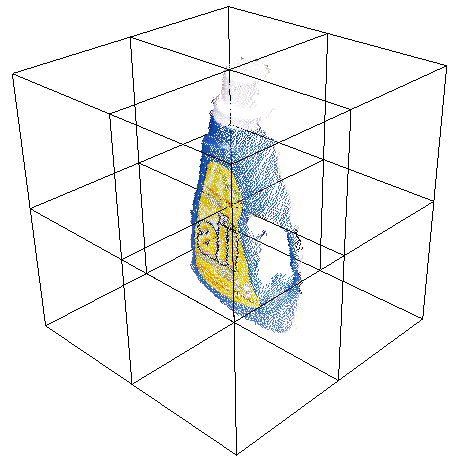
Globally Aligned Spatial Distribution (GASD) descriptors
Title: Globally Aligned Spatial Distribution (GASD) descriptors
Author: Joao Paulo Lima
Compatibility: >= PCL 1.9
This document describes the Globally Aligned Spatial Distribution (GASD) global descriptor to be used for efficient object recognition and pose estimation.


Filtering
Filtering a PointCloud using a PassThrough filter
Title: Filtering a PointCloud using a PassThrough filter
Author: Radu B. Rusu
Compatibility: > PCL 1.0
In this tutorial, we will learn how to remove points whose values fall inside/outside a user given interval along a specified dimension.
Downsampling a PointCloud using a VoxelGrid filter
Title: Downsampling a PointCloud using a VoxelGrid filter
Author: Radu B. Rusu
Compatibility: > PCL 1.0
In this tutorial, we will learn how to downsample (i.e., reduce the number of points) a Point Cloud.
Removing outliers using a StatisticalOutlierRemoval filter
Title: Removing sparse outliers using StatisticalOutlierRemoval
Author: Radu B. Rusu
Compatibility: > PCL 1.0
In this tutorial, we will learn how to remove sparse outliers from noisy data, using StatisticalRemoval.
Projecting points using a parametric model
Title: Projecting points using a parametric model
Author: Radu B. Rusu
Compatibility: > PCL 1.0
In this tutorial, we will learn how to project points to a parametric model (i.e., plane).
Extracting indices from a PointCloud
Title: Extracting indices from a PointCloud
Author: Radu B. Rusu
Compatibility: > PCL 1.0
In this tutorial, we will learn how to extract a set of indices given by a segmentation algorithm.
Removing outliers using a Conditional or RadiusOutlier removal
Title: Removing outliers using a Conditional or RadiusOutlier removal
Author: Gabe O’Leary
Compatibility: > PCL 1.0
In this tutorial, we will learn how to remove outliers from noisy data, using ConditionalRemoval, RadiusOutlierRemoval.

I/O
The PCD (Point Cloud Data) file format
Title: The PCD (Point Cloud Data) file format
Author: Radu B. Rusu
Compatibility: > PCL 0.9
This document describes the PCD file format, and the way it is used inside PCL.
Reading Point Cloud data from PCD files
Title: Reading Point Cloud data from PCD files
Author: Radu B. Rusu
Compatibility: > PCL 1.0
In this tutorial, we will learn how to read a Point Cloud from a PCD file.
Writing Point Cloud data to PCD files
Title: Writing Point Cloud data to PCD files
Author: Radu B. Rusu
Compatibility: > PCL 1.0
In this tutorial, we will learn how to write a Point Cloud to a PCD file.
Concatenate the points of two Point Clouds
Title: Concatenate the fields or points of two Point Clouds
Author: Gabe O’Leary / Radu B. Rusu
Compatibility: > PCL 1.0
In this tutorial, we will learn how to concatenate both the fields and the point data of two Point Clouds. When concatenating fields, one PointClouds contains only XYZ data, and the other contains Surface Normal information.
The OpenNI Grabber Framework in PCL
Title: Grabbing Point Clouds from an OpenNI camera
Author: Nico Blodow
Compatibility: > PCL 1.0
In this tutorial, we will learn how to acquire point cloud data from an OpenNI camera.
The Velodyne High Definition LiDAR (HDL) Grabber
Title: Grabbing Point Clouds from a Velodyne High Definition LiDAR (HDL)
Author: Keven Ring
Compatibility: >= PCL 1.7
In this tutorial, we will learn how to acquire point cloud data from a Velodyne HDL.
The PCL Dinast Grabber Framework
Title: Grabbing Point Clouds from Dinast Cameras
Author: Marco A. Gutierrez
Compatibility: >= PCL 1.7
In this tutorial, we will learn how to acquire point cloud data from a Dinast camera.
Grabbing point clouds from Ensenso cameras
Title: Grabbing point clouds from Ensenso cameras
Author: Victor Lamoine
Compatibility: >= PCL 1.8.0
In this tutorial, we will learn how to acquire point cloud data from an IDS-Imaging Ensenso camera.
Grabbing point clouds / meshes from davidSDK scanners
Title: Grabbing point clouds / meshes from davidSDK scanners
Author: Victor Lamoine
Compatibility: >= PCL 1.8.0
In this tutorial, we will learn how to acquire point cloud or mesh data from a davidSDK scanner.
Grabbing point clouds from DepthSense cameras
Title: Grabbing point clouds from DepthSense cameras
Author: Sergey Alexandrov
Compatibility: >= PCL 1.8.0
In this tutorial we will learn how to setup and use DepthSense cameras within PCL on both Linux and Windows platforms.







Keypoints
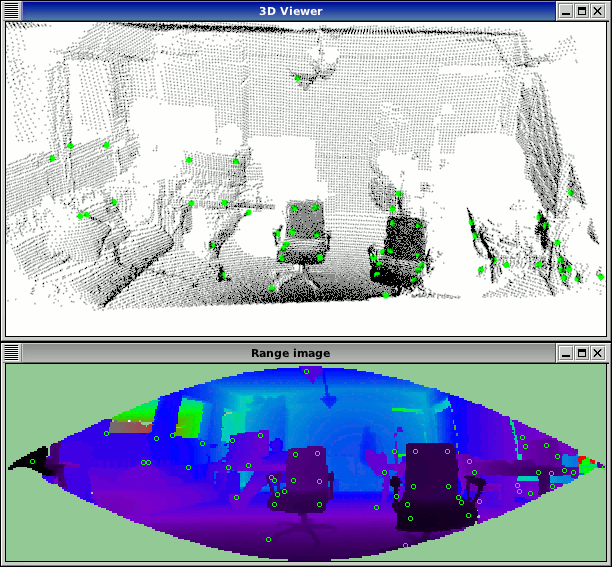
How to extract NARF keypoint from a range image
Title: How to extract NARF keypoints from a range image
Author: Bastian Steder
Compatibility: > 1.3
In this tutorial, we will learn how to extract NARF keypoints from a range image.
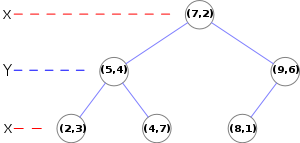
KdTree
Title: KdTree Search
Author: Gabe O’Leary
Compatibility: > PCL 1.0
In this tutorial, we will learn how to search using the nearest neighbor method for k-d trees
Octree
Title: Point cloud compression
Author: Julius Kammerl
Compatibility: > PCL 1.0
In this tutorial, we will learn how to compress a single point cloud and streams of point clouds.
Spatial Partitioning and Search Operations with Octrees
Title: Octrees for spatial partitioning and neighbor search
Author: Julius Kammerl
Compatibility: > PCL 1.0
In this tutorial, we will learn how to use octrees for spatial partitioning and nearest neighbor search.
Spatial change detection on unorganized point cloud data
Title: Spatial change detection on unorganized point cloud data
Author: Julius Kammerl
Compatibility: > PCL 1.0
In this tutorial, we will learn how to use octrees for detecting spatial changes within point clouds.

Range Images
How to create a range image from a point cloud
Title: Creating Range Images from Point Clouds
Author: Bastian Steder
Compatibility: > PCL 1.0
This tutorial demonstrates how to create a range image from a point cloud and a given sensor position.
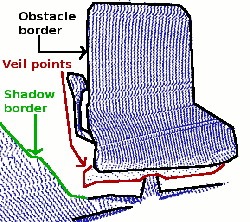
How to extract borders from range images
Title: Extracting borders from Range Images
Author: Bastian Steder
Compatibility: > PCL 1.3
This tutorial demonstrates how to extract borders (traversals from foreground to background) from a range image.
Recognition
3D Object Recognition based on Correspondence Grouping
Title: The PCL Recognition API
Author: Tommaso Cavallari, Federico Tombari
Compatibility: > PCL 1.6
This tutorial aims at explaining how to perform 3D Object Recognition based on the pcl_recognition module.
Title: Implicit Shape Model
Author: Sergey Ushakov
Compatibility: > PCL 1.7
In this tutorial we will learn how the Implicit Shape Model algorithm works and how to use it for finding objects centers.
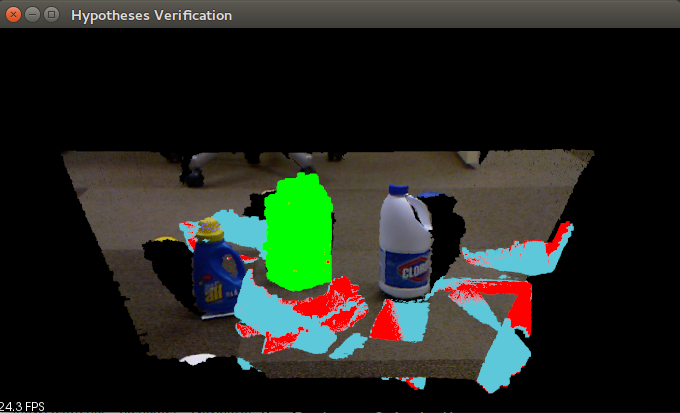
Tutorial: Hypothesis Verification for 3D Object Recognition
Title: Hypothesis Verification for 3D Object Recognition
Author: Daniele De Gregorio, Federico Tombari
Compatibility: > PCL 1.7
This tutorial aims at explaining how to do 3D object recognition in clutter by verifying model hypotheses in cluttered and heavily occluded 3D scenes.

Registration
Title: The PCL Registration API
Author: Dirk Holz, Radu B. Rusu, Jochen Sprickerhof
Compatibility: > PCL 1.5
In this document, we describe the point cloud registration API and its modules: the estimation and rejection of point correspondences, and the estimation of rigid transformations.
How to use iterative closest point
Title: How to use iterative closest point algorithm
Author: Gabe O’Leary
Compatibility: > PCL 1.0
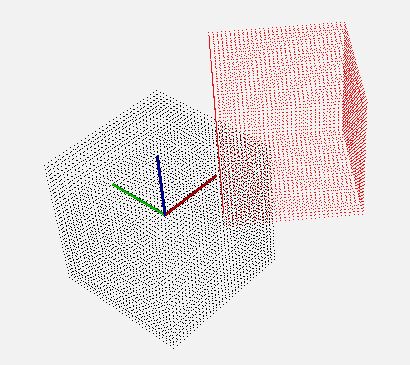
This tutorial gives an example of how to use the iterative closest point algorithm to see if one PointCloud is just a rigid transformation of another PointCloud.
How to incrementally register pairs of clouds
Title: How to incrementally register pairs of clouds
Author: Raphael Favier
Compatibility: > PCL 1.4
This document demonstrates using the Iterative Closest Point algorithm in order to incrementally register a series of point clouds two by two.
Interactive Iterative Closest Point
Title: Interactive ICP
Author: Victor Lamoine
Compatibility: > PCL 1.5
This tutorial will teach you how to build an interactive ICP program
How to use Normal Distributions Transform
Title: How to use the Normal Distributions Transform algorithm
Author: Brian Okorn
Compatibility: > PCL 1.6
This document demonstrates using the Normal Distributions Transform algorithm to register two large point clouds.
In-hand scanner for small objects
Title: How to use the In-hand scanner for small objects
Author: Martin Saelzle
Compatibility: >= PCL 1.7
This document shows how to use the In-hand scanner applications to obtain colored models of small objects with RGB-D cameras.
Robust pose estimation of rigid objects
Title: Robust pose estimation of rigid objects
Author: Anders Glent Buch
Compatibility: >= PCL 1.7
In this tutorial, we show how to find the alignment pose of a rigid object in a scene with clutter and occlusions.
Sample Consensus
How to use Random Sample Consensus model
Title: How to use Random Sample Consensus model
Author: Gabe O’Leary
Compatibility: > PCL 1.0
In this tutorial we learn how to use a RandomSampleConsensus with a plane model to obtain the cloud fitting to this model.
Segmentation
Title: Plane model segmentation
Author: Radu B. Rusu
Compatibility: > PCL 1.3
In this tutorial, we will learn how to segment arbitrary plane models from a given point cloud dataset.
Title: Cylinder model segmentation
Author: Radu B. Rusu
Compatibility: > PCL 1.3
In this tutorial, we will learn how to segment arbitrary cylindrical models from a given point cloud dataset.
Title: Euclidean Cluster Extraction
Author: Serkan Tuerker
Compatibility: > PCL 1.3
In this tutorial we will learn how to extract Euclidean clusters with the
pcl::EuclideanClusterExtractionclass.
Title: Region Growing Segmentation
Author: Sergey Ushakov
Compatibility: >= PCL 1.7
In this tutorial we will learn how to use region growing segmentation algorithm.
Color-based region growing segmentation
Title: Color-based Region Growing Segmentation
Author: Sergey Ushakov
Compatibility: >= PCL 1.7
In this tutorial we will learn how to use color-based region growing segmentation algorithm.
Title: Min-Cut Based Segmentation
Author: Sergey Ushakov
Compatibility: >= PCL 1.7
In this tutorial we will learn how to use min-cut based segmentation algorithm.
Conditional Euclidean Clustering
Title: Conditional Euclidean Clustering
Author: Frits Florentinus
Compatibility: >= PCL 1.7
This tutorial describes how to use the Conditional Euclidean Clustering class in PCL: A segmentation algorithm that clusters points based on Euclidean distance and a user-customizable condition that needs to hold.
Difference of Normals Based Segmentation
Title: Difference of Normals Based Segmentation
Author: Yani Ioannou
Compatibility: >= PCL 1.7
In this tutorial we will learn how to use the difference of normals feature for segmentation.
Clustering of Pointclouds into Supervoxels - Theoretical primer
Title: Supervoxel Clustering
Author: Jeremie Papon
Compatibility: >= PCL 1.8
In this tutorial, we show to break a pointcloud into the mid-level supervoxel representation.
Identifying ground returns using ProgressiveMorphologicalFilter segmentation
Title: Progressive Morphological Filtering
Author: Brad Chambers
Compatibility: >= PCL 1.8
In this tutorial, we show how to segment a point cloud into ground and non-ground returns.
Filtering a PointCloud using ModelOutlierRemoval
Title: Model outlier removal
Author: Timo Häckel
Compatibility: >= PCL 1.7.2
This tutorial describes how to extract points from a point cloud using SAC models

Surface
Smoothing and normal estimation based on polynomial reconstruction
Title: Smoothing and normal estimation based on polynomial reconstruction
Author: Zoltan-Csaba Marton, Alexandru E. Ichim
Compatibility: > PCL 1.6
In this tutorial, we will learn how to construct and run a Moving Least Squares (MLS) algorithm to obtain smoothed XYZ coordinates and normals.
Construct a concave or convex hull polygon for a plane model
Title: Construct a concave or convex hull polygon for a plane model
Author: Gabe O’Leary, Radu B. Rusu
Compatibility: > PCL 1.0
In this tutorial we will learn how to calculate a simple 2D concave or convex hull polygon for a set of points supported by a plane.
Fast triangulation of unordered point clouds
Title: Fast triangulation of unordered point clouds
Author: Zoltan-Csaba Marton
Compatibility: > PCL 1.0
In this tutorial we will learn how to run a greedy triangulation algorithm on a PointCloud with normals to obtain a triangle mesh based on projections of the local neighborhood.
Fitting trimmed B-splines to unordered point clouds
Title: Fitting trimmed B-splines to unordered point clouds
Author: Thomas Mörwald
Compatibility: > PCL 1.7
In this tutorial we will learn how to reconstruct a smooth surface from an unordered point-cloud by fitting trimmed B-splines.
Visualization
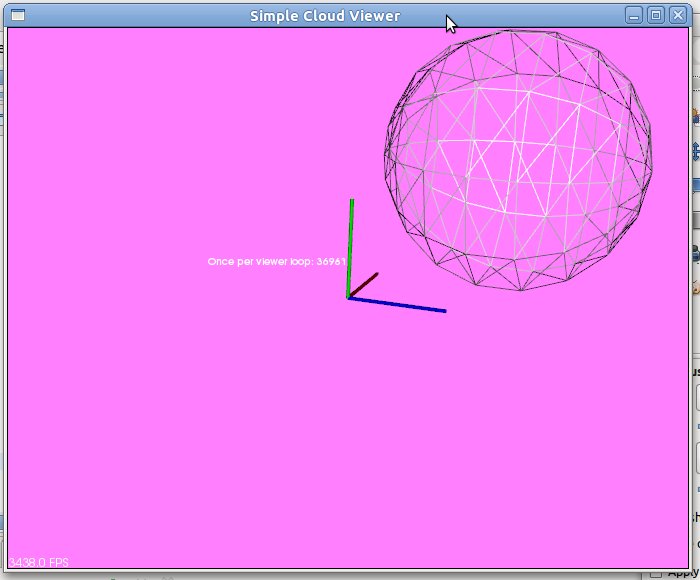
Title: Visualizing Point Clouds
Author: Ethan Rublee
Compatibility: > PCL 1.0
This tutorial demonstrates how to use the pcl visualization tools.
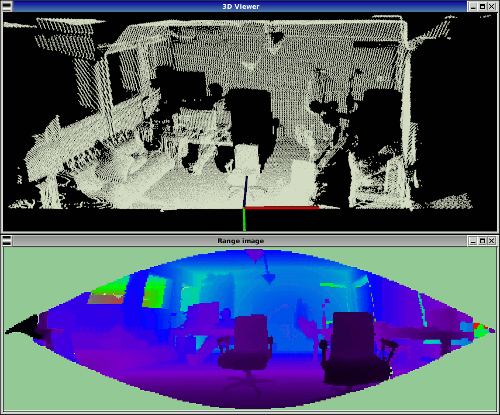
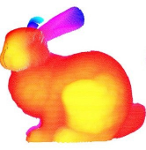
How to visualize a range image
Title: Visualizing Range Images
Author: Bastian Steder
Compatibility: > PCL 1.3
This tutorial demonstrates how to use the pcl visualization tools for range images.
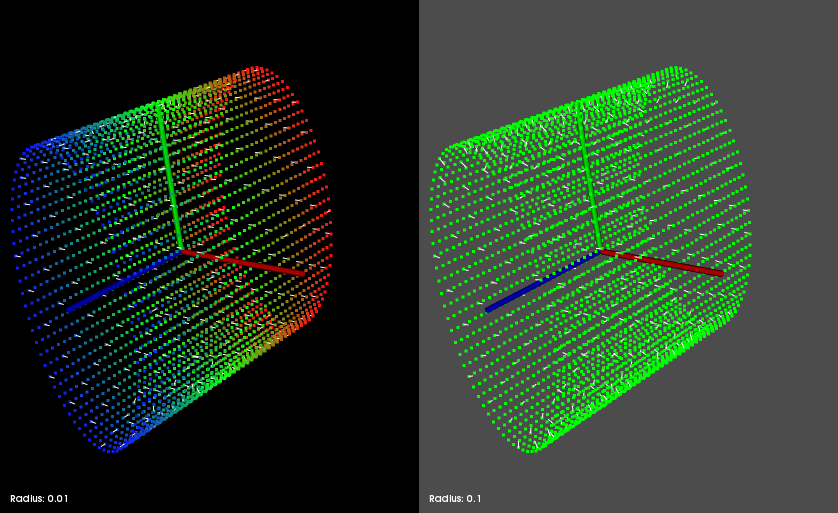
Title: PCLVisualizer
Author: Geoffrey Biggs
Compatibility: > PCL 1.3
This tutorial demonstrates how to use the PCLVisualizer class for powerful visualisation of point clouds and related data.
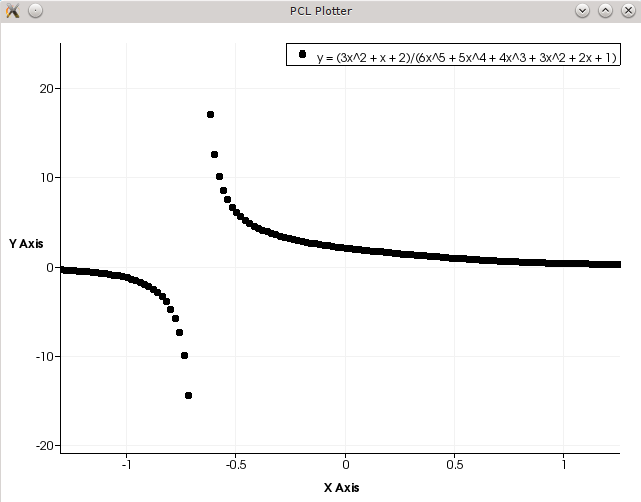
Title: PCLPlotter
Author: Kripasindhu Sarkar
Compatibility: > PCL 1.7
This tutorial demonstrates how to use the PCLPlotter class for powerful visualisation of plots, charts and histograms of raw data and explicit functions.
Title: PCL Visualization overview
Author: Radu B. Rusu
Compatibility: >= PCL 1.0
This tutorial will give an overview on the usage of the PCL visualization tools.
Create a PCL visualizer in Qt with cmake
Title: Create a PCL visualizer in Qt with cmake
Author: Victor Lamoine
Compatibility: > PCL 1.5
This tutorial shows you how to create a PCL visualizer within a Qt application.
Create a PCL visualizer in Qt to colorize clouds
Title: Create a PCL visualizer in Qt to colorize clouds
Author: Victor Lamoine
Compatibility: > PCL 1.5
This tutorial shows you how to color point clouds within a Qt application.

Applications
Aligning object templates to a point cloud
Title: Aligning object templates to a point cloud
Author: Michael Dixon
Compatibility: > PCL 1.3
This tutorial gives an example of how some of the tools covered in the previous tutorials can be combined to solve a higher level problem — aligning a previously captured model of an object to some newly captured data.
Cluster Recognition and 6DOF Pose Estimation using VFH descriptors
Title: Cluster Recognition and 6DOF Pose Estimation using VFH descriptors
Author: Radu B. Rusu
Compatibility: > PCL 0.8
In this tutorial we show how the Viewpoint Feature Histogram (VFH) descriptor can be used to recognize similar clusters in terms of their geometry.
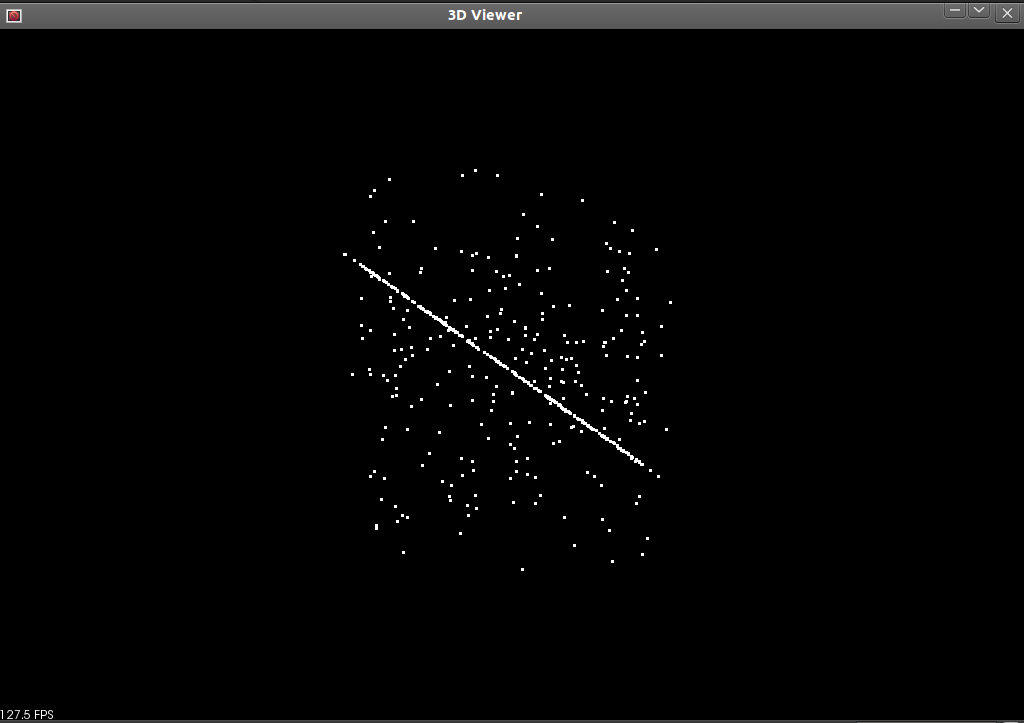
Point Cloud Streaming to Mobile Devices with Real-time Visualization
Title: Point Cloud Streaming to Mobile Devices with Real-time Visualization
Author: Pat Marion
Compatibility: > PCL 1.3
This tutorial describes how to send point cloud data over the network from a desktop server to a client running on a mobile device.
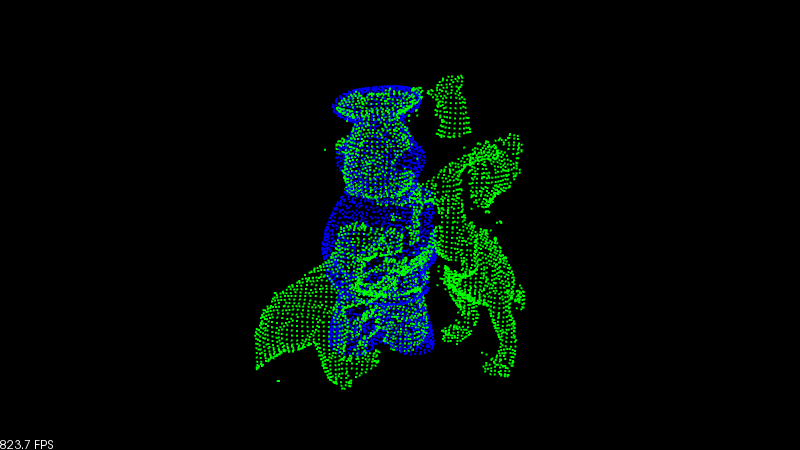
Detecting people on a ground plane with RGB-D data
Title: Detecting people on a ground plane with RGB-D data
Author: Matteo Munaro
Compatibility: >= PCL 1.7
This tutorial presents a method for detecting people on a ground plane with RGB-D data.

GPU
Configuring your PC to use your Nvidia GPU with PCL
Title: GPU Installation
Author: Koen Buys
Compatibility: PCL git master
This tutorial explains how to configure PCL to use with a Nvidia GPU
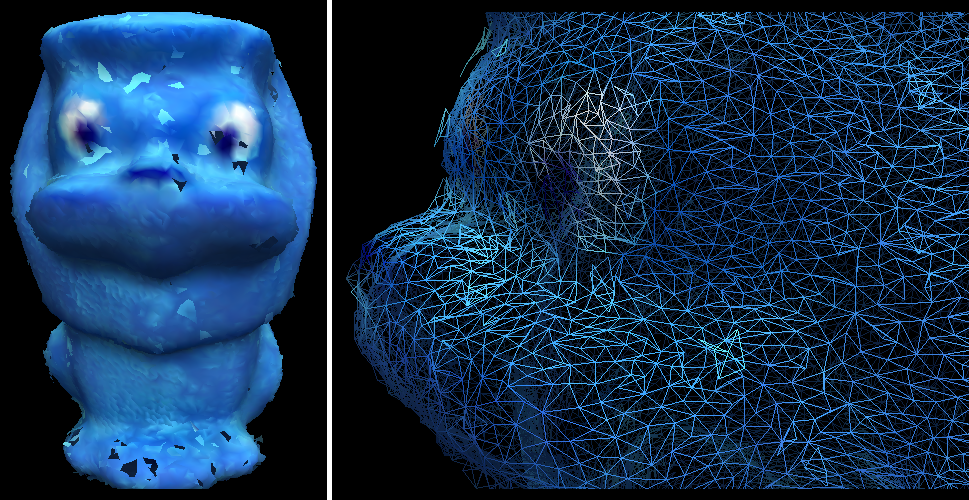
Using Kinfu Large Scale to generate a textured mesh
Title: Using Kinfu Large Scale to generate a textured mesh
Author: Francisco Heredia and Raphael Favier
Compatibility: PCL git master
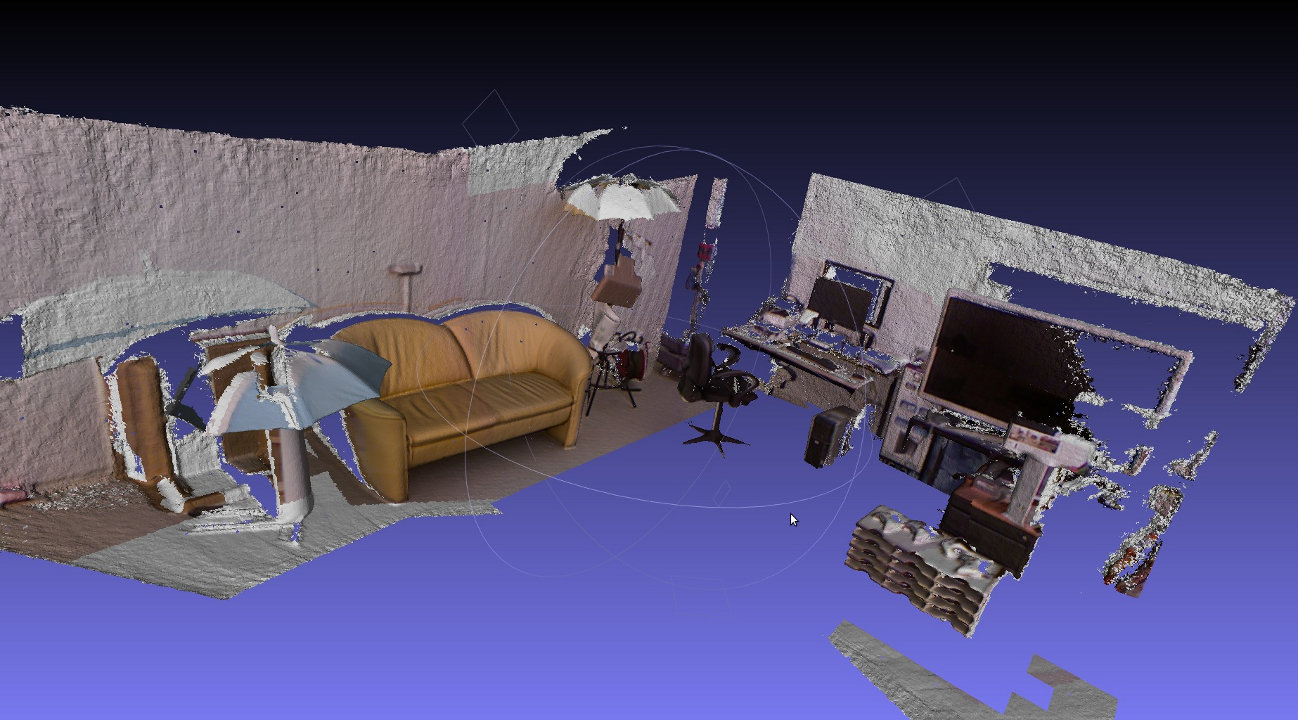
This tutorial demonstrates how to use KinFu Large Scale to produce a mesh from a room, and apply texture information in post-processing for a more appealing visual result.
Detecting people and their poses using PointCloud Library
Title: People Detection
Author: Koen Buys
Compatibility: PCL git master
This tutorial presents a method for people and pose detection.